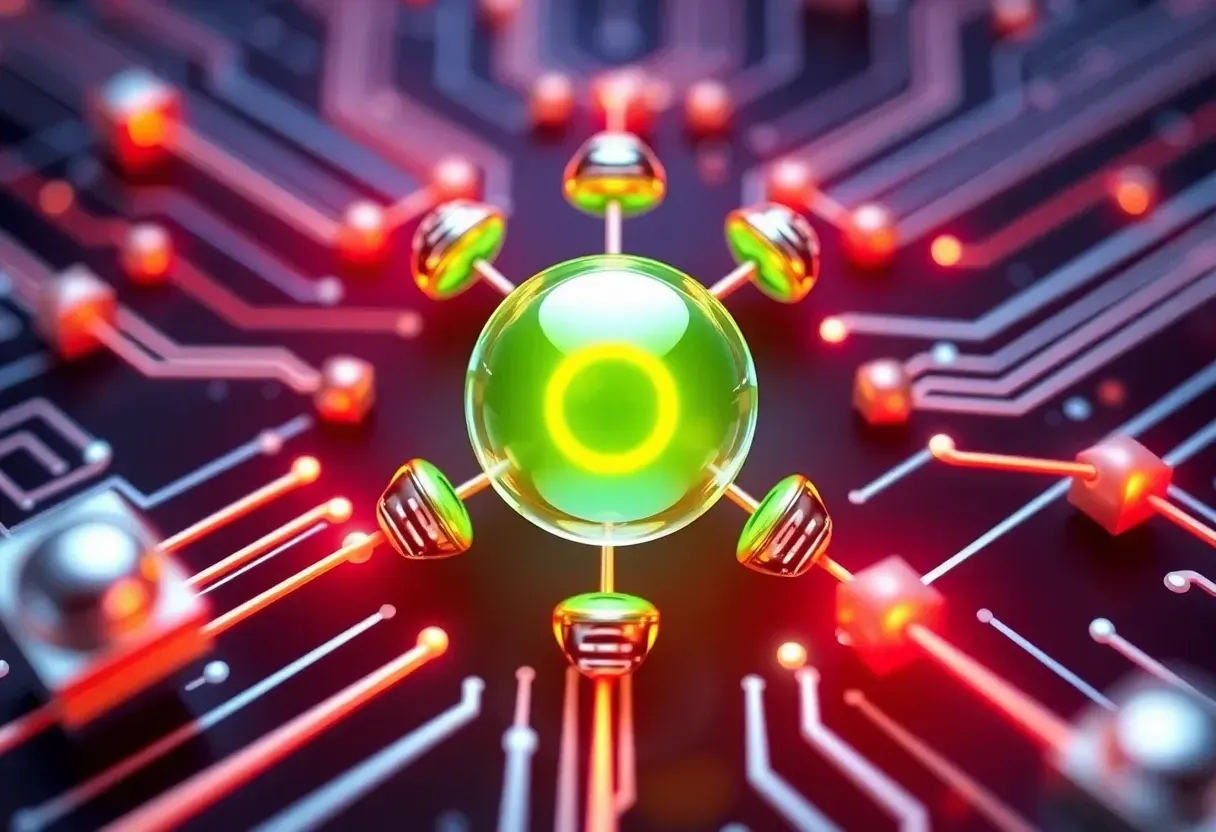
```html מחברים: Neereja Sundaresan Theodore J. Yoder Youngseok Kim Muyuan Li Edward H. Chen Grace Harper Ted Thorbeck Andrew W. Cross Antonio D. Córcoles Maika Takita תקציר תיקון שגיאות קוונטיות מציע נתיב מבטיח לביצוע חישובים קוונטיים בנאמנות גבוהה. למרות שביצועים מתואמים-תקלות של אלגוריתמים עדיין לא מומשו, שיפורים אחרונים באלקטרוניקה בקרה וחומרה קוונטית מאפשרים הדגמות מתקדמות יותר ויותר של הפעולות הדרושות לתיקון שגיאות. כאן, אנו מבצעים תיקון שגיאות קוונטיות על קיוביטים מוליכים-על המחוברים במבנה של כוורת כבדה. אנו מקודדים קיוביט לוגי במרחק שלוש ומבצעים מספר סיבובים של מדידות סינדרום עמידות-תקלות המאפשרות תיקון של כל תקלה בודדת במעגלים. באמצעות משוב בזמן אמת, אנו מאפסים סינדרום ודגלים של קיוביטים באופן מותנה לאחר כל מחזור חילוץ סינדרום. אנו מדווחים על שגיאה לוגית תלוית מפַענח, עם שגיאה לוגית ממוצעת למדידת סינדרום בבסיס Z(X) של ~0.040 (~0.088) ו-~0.037 (~0.087) עבור מפַענחי התאמה וסבירות מרבית, בהתאמה, על נתונים שעברו סינון דליפה. מבוא לתוצאות של חישובים קוונטיים יכולות להיות פגומות, בפועל, עקב רעש בחומרה. כדי לבטל את התקלות הנובעות מכך, ניתן להשתמש בקודים לתיקון שגיאות קוונטיות (QEC) כדי לקודד את המידע הקוונטי לדרגות חופש לוגיות מוגנות, ולאחר מכן על ידי תיקון התקלות מהר יותר מהצטברותן לאפשר חישובים עמידים-תקלות (FT). ביצוע מלא של QEC כנראה ידרוש: הכנת מצבים לוגיים; מימוש של סט אוניברסלי של שערים לוגיים, שעשוי לדרוש הכנה של מצבי קסם; מדידות חוזרות ונשנות של סינדרומים; ופענוח הסינדרומים לתיקון שגיאות. אם יצליחו, שיעורי השגיאה הלוגיים הנובעים אמורים להיות פחות משיעורי השגיאה הפיזיים הבסיסיים, ולרדת עם הגדלת מרחקי הקוד לערכים זניחים. בחירת קוד QEC דורשת התחשבות בחומרה הבסיסית ובתכונות הרעש שלה. עבור מבנה של כוורת כבדה , של קיוביטים, קודי QEC תת-מערכתיים אטרקטיביים מכיוון שהם מתאימים היטב לקיוביטים עם קישוריות מופחתת. קודים אחרים הראו הבטחה בשל הסף הגבוה יחסית שלהם ל-FT או מספר גדול של שערים לוגיים רוחביים . למרות שתקורה המרחב והזמן שלהם עלולות להוות מכשול משמעותי לקנה מידה, קיימות גישות מעודדות להפחתת המשאבים היקרים ביותר על ידי ניצול סוג כלשהו של הפחתת שגיאות . 1 2 3 4 5 6 בתהליך הפענוח, תיקון מוצלח תלוי לא רק בביצועי החומרה הקוונטית, אלא גם ביישום אלקטרוניקת הבקרה המשמשת לרכישת ועיבוד המידע הקלאסי המתקבל ממדידות סינדרום. במקרה שלנו, אתחול שני קיוביטי הסינדרום והדגל באמצעות משוב בזמן אמת בין מחזורי מדידה יכול לעזור למתן שגיאות. ברמת הפענוח, בעוד שקיימים פרוטוקולים מסוימים לביצוע QEC אסינכרוני במסגרת FT , , הקצב שבו מתקבלים סינדרומי השגיאה צריך להיות פרופורציונלי לזמן העיבוד הקלאסי שלהם כדי להימנע מגבייה הולכת וגדלה של נתוני סינדרום. כמו כן, פרוטוקולים מסוימים, כמו שימוש במצב קסם עבור שער T לוגי , דורשים יישום של הזרמה-קדימה בזמן אמת. 7 8 9 לפיכך, החזון ארוך הטווח של QEC אינו מתכנס סביב מטרה אולטימטיבית אחת אלא צריך להיתפס כמערך של משימות קשורות עמוקות. הנתיב הניסויי בפיתוח טכנולוגיה זו יכלול הדגמה של משימות אלו בנפרד תחילה ושילובן ההדרגתי מאוחר יותר, תמיד תוך שיפור מתמיד של המדדים המשויכים להן. חלק מההתקדמות הזו משתקפת בהתקדמויות רבות אחרונות במערכות קוונטיות על פלטפורמות פיזיות שונות, שהדגימו או קירוב היבטים שונים של הדרישות לחישוב קוונטי FT. בפרט, הכנת מצב לוגי FT הודגמה על יונים , ספינים גרעיניים ביהלום וקיוביטים מוליכים-על . מחזורי חילוץ סינדרום חוזרים הודגמו בקיוביטים מוליכים-על בקודים קטנים לזיהוי שגיאות , , כולל תיקון שגיאות חלקי כמו גם סט אוניברסלי (אם כי לא FT) של שערי קיוביט יחיד . הדגמת FT של סט שערים אוניברסלי על שני קיוביטים לוגיים דווחה לאחרונה על יונים . בתחום תיקון השגיאות, היו מימושים אחרונים של קוד שטח במרחק-3 על קיוביטים מוליכים-על עם פענוח ובחירה-לאחר-סינון , כמו גם יישום FT של זיכרון קוונטי מוגן דינמית באמצעות קוד צבע והכנת מצב FT, פעולה ומדידה, כולל המייצבים שלה, של מצב לוגי בקוד Bacon-Shor על יונים , . 10 11 12 13 14 15 16 17 18 19 20 20 21 כאן אנו משלבים את היכולת של משוב בזמן אמת במערכת קיוביטים מוליכים-על עם פרוטוקול פענוח סבירות מרבית שטרם נחקר בניסוי כדי לשפר את הישרדות המצבים הלוגיים. אנו מדגימים כלים אלו כחלק מהפעולה FT של קוד תת-מערכת , קוד הכוורת הכבדה , על מעבד קוונטי מוליך-על. חיוני להפוך את היישום שלנו של קוד זה לעמיד-תקלות הם קיוביטי דגל, שכאשר נמצאו שאינם אפס, מתריעים למפַענח על שגיאות מעגל. על ידי איפוס מותנה של קיוביטי דגל וסינדרום לאחר כל מחזור מדידת סינדרום, אנו מגנים על המערכת שלנו מפני שגיאות הנובעות מאסימטריה ברעש הטבועה בהרפיית אנרגיה. אנו ממשיכים לנצל אסטרטגיות פענוח שתוארו לאחרונה ומרחיבים את רעיונות הפענוח כדי לכלול מושגי סבירות מרבית , , . 22 1 15 4 23 24 תוצאות קוד הכוורת הכבדה ומעגלים מרובי סיבובים קוד הכוורת הכבדה שאנו שוקלים הוא קוד של = 9 קיוביטים המקודד = 1 קיוביט לוגי במרחק = 3 . קבוצות המייצבים (gauge) של ו- (ראה איור. a) וקבוצות המייצבים נוצרות על ידי n k d 1 Z X 1 קבוצות המייצבים הן המרכזים של קבוצות המייצבים (gauge) המתאימות . זה אומר שהמייצבים, כמוצרים של אופרטורי מייצבים, ניתנים להסקה ממדידות של אופרטורי המייצבים בלבד. ניתן לבחור אופרטורים לוגיים להיות = 1 2 3 ו- = 1 3 7. XL X X X ZL Z Z Z אופרטורי מייצבים (gauge) של (כחול) ו- (אדום) (משוואות ( ) ו-( )) ממופים על 23 הקיוביטים הנדרשים עם קוד הכוורת הכבדה במרחק-3. קיוביטי הקוד ( 1 − 9) מוצגים בצהוב, קיוביטי סינדרום ( 17, 19, 20, 22) המשמשים למייצבי בכחול, וקיוביטי דגל וסינדרומים המשמשים למייצבי >ב-לבן. הסדר והכיוון שבהם שערים CX מיושמים בכל תת-מקטע (0 עד 4) מסומנים על ידי החצים הממוספרים. תרשים מעגל של סיבוב מדידת סינדרום אחד, הכולל גם מייצבי וגם . תרשים המעגל ממחיש מקביליות מותרת של פעולות שער: אלו שבגבולות שנקבעו על ידי מחסומי תזמון (קווים אנכיים מקווקווים אפורים). מכיוון שכל משך שער דו-קיוביטי שונה, תזמון השער הסופי נקבע עם מעבר רגיל של תעתיק מעגל לפי העדפה מאוחרת ככל האפשר; ולאחר מכן מתווספת דינמיקת דיכוי לקיוביטי הנתונים היכן שהזמן מאפשר. פעולות מדידה ואיפוס מבודדות מפעולות שער אחרות על ידי מחסומים כדי לאפשר דיכוי דינמי אחיד שיתווסף לקיוביטי נתונים במנוחה. תרשימי פענוח עבור שלושה סיבובים של מדידות מייצבי ו-( ) >עם רעש ברמת המעגל מאפשרים תיקון של שגיאות >ו- , בהתאמה. הצמתים הכחולים והאדומים בתרשימים מתאימים להבדלי סינדרומים, בעוד שהצמתים השחורים הם הגבול. קשתות מקודדות דרכים שונות שבהן שגיאות יכולות להתרחש במעגל כפי שתואר בטקסט. צמתים מסומנים לפי סוג מדידת המייצב ( >או ), יחד עם אינדקס תחתון המציין את המייצב, וסופרסקריפטים המציינים את הסיבוב. קשתות שחורות, הנובעות משגיאות פאולי >על קיוביטי קוד (ולכן הן רק בגודל 2), מחברות את שני התרשימים ב-( ) וב-( ), אך אינן משמשות בפענוח ההתאמה. ההיפר-קשתות בגודל 4, שאינן משמשות על ידי התאמה, אך משמשות בפענוח סבירות מרבית. צבעים הם רק לצורך בהירות. תרגום כל אחד מהם בזמן לפי סיבוב אחד נותן גם היפר-קשת חוקית (עם שינוי מסוים בגבולות הזמן). גם לא מוצגות היפר-קשתות בגודל 3. a Z X 1 2 Q Q Q Q Q Q Z X b X Z c Z d X X Z Z X e Y c d f כאן אנו מתמקדים במעגל FT מסוים, ניתן להשתמש בטכניקות רבות שלנו באופן כללי עם קודים ומעגלים שונים. שני תת-מעגלים, המוצגים באיור. b, נבנים כדי למדוד את אופרטורי המייצבים (gauge) של >ו- . מעגל מדידת המייצב (gauge) של >רוכש גם מידע שימושי על ידי מדידת קיוביטי דגל. 1 X Z Z אנו מכינים מצבים לוגיים במצב () על ידי הכנת תשעה קיוביטים תחילה במצב () ומדידת מייצב ה- >(מייצב ה- ). לאחר מכן אנו מבצעים >סיבובים של מדידת סינדרום, כאשר סיבוב אחד כולל מדידת מייצב >ואחריה מדידת מייצב >(בהתאמה, מדידת מייצב >ואחריה מדידת מייצב ). לבסוף, אנו קוראים את כל תשעת הקיוביטים של הקוד בבסיס >( ). אנו מבצעים את אותם ניסויים עבור מצבים לוגיים התחלתיים ו- גם כן, על ידי אתחול פשוט של תשעת הקיוביטים ב- ו- >בהתאמה. X Z r Z X X Z Z X אלגוריתמי פענוח בהקשר של חישוב קוונטי FT, מפַענח הוא אלגוריתם שמקבל כקלט מדידות סינדרום מקוד תיקון שגיאות ומוציא תיקון לקיוביטים או לנתוני המדידה. בחלק זה אנו מתארים שני אלגוריתמי פענוח: פענוח התאמה מושלמת ופענוח סבירות מרבית. ההיפר-גרף של הפענוח >הוא תיאור תמציתי של המידע שנאסף על ידי מעגל FT וזמין לאלגוריתם פענוח. הוא מורכב מקבוצת צמתים, או אירועים רגישים לשגיאה, , וקבוצת היפר-קשתות , המקודדות את המתאמים בין אירועים הנגרמים על ידי שגיאות במעגל. איור. c–f מתאר חלקים מההיפר-גרף של הפענוח עבור הניסוי שלנו. 15 V E 1 בניית היפר-גרף פענוח למעגלי מייצבים עם רעש פאולי ניתנת לביצוע באמצעות הדמיות Gottesman-Knill סטנדרטיות >או טכניקות דומות של מעקב פאולי . ראשית, נוצר אירוע רגיש לשגיאה עבור כל מדידה דטרמיניסטית במעגל ללא שגיאות. מדידה דטרמיניסטית >היא כל מדידה שתוצאתה ∈ {0, 1} ניתנת לחיזוי על ידי חיבור מודולו שניים של תוצאות המדידה מקבוצה של מדידות קודמות. כלומר, עבור מעגל ללא שגיאות, , כאשר הקבוצה ניתנת למציאה על ידי הדמיית המעגל. קבע את ערך האירוע הרגיש לשגיאה ל- − (mod2), שהוא אפס (נקרא גם טריוויאלי) בהיעדר שגיאות. לפיכך, תצפית על אירוע רגיש לשגיאה שאינו אפס (נקרא גם לא טריוויאלי) מעידה שהמעגל סבל לפחות שגיאה אחת. במעגלים שלנו, אירועים רגישים לשגיאה הם מדידות קיוביט דגל או ההפרש בין מדידות עוקבות של אותו מייצב (נקרא גם סינדרומים דיפרנציאליים). 25 26 M m m FM לאחר מכן, היפר-קשתות מתווספות על ידי התחשבות בתקלות מעגל. המודל שלנו מכיל הסתברות תקלה >עבור כל אחד מכמה רכיבי מעגל pC כאן אנו מבחינים בין פעולת הזהות id על קיוביטים בזמן שקיוביטים אחרים עוברים שערים אוניטריים, לבין פעולת הזהות idm על קיוביטים כאשר אחרים עוברים מדידה ואיפוס. אנו מאפסים קיוביטים לאחר שנמדדו, בעוד שאנו מאתחלים קיוביטים שעדיין לא נעשה בהם שימוש בניסוי. לבסוף, cx הוא שער controlled-not, h הוא שער Hadamard, ו-x, y, z הם שערי פאולי. (ראה שיטות "IBM_Peekskill ופרטי ניסוי" לפרטים נוספים). ערכים נומריים עבור >מפורטים בשיטות "IBM_Peekskill ופרטי ניסוי". pC מודל השגיאה שלנו הוא רעש דיפולריזציה של מעגל. עבור שגיאות אתחול ואיפוס, פאולי >מיושם בהסתברויות המתאימות init ו- reset >לאחר הכנת המצב האידיאלי. עבור שגיאות מדידה, פאולי >מיושם בהסתברות לפני המדידה האידיאלית. שער אוניטרי של קיוביט יחיד (שער דו-קיוביטי) >סובל בהסתברות >אחת משלוש (חמש עשרה) שגיאות פאולי שאינן זהות העוקבות אחר השער האידיאלי. יש סיכוי שווה להתרחשות כל אחת משלוש (חמש עשרה) שגיאות פאולי. X p p X C pC כאשר תקלה בודדת מתרחשת במעגל, היא גורמת לחלק מסוים של אירועים רגישים לשגיאה להיות לא טריוויאליים. קבוצת אירועים רגישים לשגיאה זו הופכת להיפר-קשת. קבוצת כל ההיפר-קשתות היא . שתי תקלות שונות עשויות להוביל לאותה היפר-קשת, כך שכל היפר-קשת עשויה להיות מפורשת כמייצגת קבוצה של תקלות, שכל אחת מהן גורמת בנפרד לאירועים בהיפר-קשת להיות לא טריוויאליים. משויכת לכל היפר-קשת הסתברות, אשר, בסדר ראשון, היא סכום ההסתברויות של תקלות בקבוצה. E תקלה עשויה גם להוביל לשגיאה אשר, כשהיא מועברת לסוף המעגל, אנטי-מתחלפת עם אחד או יותר מהאופרטורים הלוגיים של הקוד, ומחייבת תיקון לוגי. אנו מניחים באופן כללי שלקוד יש >קיוביטים לוגיים ובסיס של 2 >אופרטורים לוגיים, אך מציינים כי = 1 עבור קוד הכוורת הכבדה המשמש בניסוי. אנו יכולים לעקוב אחר אילו אופרטורים לוגיים אנטי-מתחלפים עם השגיאה באמצעות וקטור מ- . לפיכך, כל היפר-קשת >מתויגת גם היא על ידי אחד מהוקטורים הללו , הנקרא תווית לוגית. שימו לב שאם לקוד יש מרחק של לפחות שלוש, לכל היפר-קשת יש תווית לוגית ייחודית. k k k h לבסוף, אנו מציינים שאלגוריתם פענוח יכול לבחור לפשט את ההיפר-גרף של הפענוח בדרכים שונות. דרך אחת שאנו תמיד משתמשים בה כאן היא תהליך ביטול הדגלה (deflagging). מדידות דגל מקיוביטים 16, 18, 21, 23 פשוט מתעלמות ללא יישום תיקונים. אם דגל 11 אינו טריוויאלי ו-12 טריוויאלי, יש ליישם >על 2. אם 12 אינו טריוויאלי ו-11 טריוויאלי, יש ליישם >על קיוביט 6. אם דגל 13 אינו טריוויאלי ו-14 טריוויאלי, יש ליישם >על קיוביט 4. אם 14 אינו טריוויאלי ו-13 טריוויאלי, יש ליישם >על קיוביט 8. ראה הפניה. >לפרטים מדוע זה מספיק לעמידות לתקלות. זה אומר שבמקום לכלול אירועים רגישים לשגיאה ממדידות קיוביט דגל ישירות, אנו מעבדים מראש את הנתונים על ידי שימוש במידע הדגל כדי ליישם תיקוני פאולי >וירטואליים ולהתאים אירועים רגישים לשגיאה נוספים בהתאם. היפר-קשתות עבור ההיפר-גרף שבוטל הדגל ניתן למצוא באמצעות הדמיית מייצב המשלבת את תיקוני . תן ל- >לציין את מספר הסיבובים. לאחר ביטול הדגלה, גודל הקבוצה >עבור ניסויי בסיס >(בהתאמה ) הוא ∣ ∣ = 6 + 2 (בהתאמה 6 + 4), עקב מדידת שישה מייצבים לסיבוב ושני (בהתאמה ארבעה) מייצבים ראשוניים רגישים לשגיאה לאחר הכנת המצב. גודל >הוא באופן דומה ∣ ∣ = 60 − 13 (בהתאמה 60 − 1) עבור > 0. Z Z Z Z 15 Z Z r V Z X V r r E E r r r בהתחשב בשגיאות >ו- >בנפרד, הבעיה של מציאת תיקון שגיאה במשקל מינימלי עבור קוד השטח ניתנת להפחתה למציאת התאמה מושלמת במשקל מינימלי בגרף . מפַענחי התאמה ממשיכים להיחקר בשל מעשיותם >יכולת היישום הרחבה שלהם , . בחלק זה, אנו מתארים את מפַענח ההתאמה עבור קוד הכוורת הכבדה שלנו במרחק-3. X Z 4 27 28 29 גר