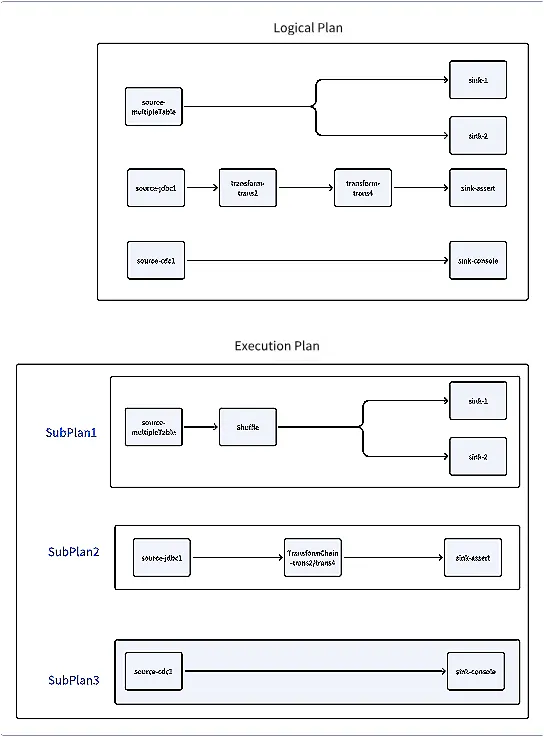
이것은 Apache SeaTunnel Zeta 엔진 소스 코드를 분석하는 시리즈 기사의 마지막 부분입니다. 전체적인 그림을 얻으려면 이전 시리즈를 검토하세요. Apache SeaTunnel Zeta 엔진의 소스 코드 분석(1부): 서버 초기화 Apache SeaTunnel Zeta 엔진의 소스 코드 분석(2부): 클라이언트 측의 작업 제출 프로세스 서버가 시작된 후 실행되는 구성 요소를 살펴보겠습니다. : 마스터/스탠바이 노드에서만 활성화되고, 클러스터 상태를 수신하고 마스터-스탠바이 장애 조치를 처리합니다. CoordinatorService : 워커 노드에서 활성화되어 주기적으로 마스터에 상태를 보고합니다. SlotService : 워커 노드에서 활성화되어 주기적으로 작업 메트릭을 IMAP에 업데이트합니다. TaskExecutionService 클러스터에서 작업을 수신하지 않으면 이러한 구성 요소가 실행됩니다. 그러나 클라이언트가 서버에 메시지를 보내면 서버는 어떻게 처리합니까? SeaTunnelSubmitJobCodec 메시지 수신 클라이언트와 서버가 다른 머신에 있기 때문에 메서드 호출을 사용할 수 없습니다. 대신 메시지 전달이 사용됩니다. 메시지를 받으면 서버는 어떻게 처리합니까? 첫째, 클라이언트는 유형의 메시지를 보냅니다. SeaTunnelSubmitJobCodec // Client code ClientMessage request = SeaTunnelSubmitJobCodec.encodeRequest( jobImmutableInformation.getJobId(), seaTunnelHazelcastClient .getSerializationService() .toData(jobImmutableInformation), jobImmutableInformation.isStartWithSavePoint()); PassiveCompletableFuture<Void> submitJobFuture = seaTunnelHazelcastClient.requestOnMasterAndGetCompletableFuture(request); 클래스에서는 메시지 유형을 클래스에 매핑하는 클래스와 연관됩니다. 의 경우 클래스에 매핑됩니다. SeaTunnelSubmitJobCodec MessageTask SeaTunnelMessageTaskFactoryProvider SeaTunnelSubmitJobCodec SubmitJobTask private final Int2ObjectHashMap<MessageTaskFactory> factories = new Int2ObjectHashMap<>(60); private void initFactories() { factories.put( SeaTunnelPrintMessageCodec.REQUEST_MESSAGE_TYPE, (clientMessage, connection) -> new PrintMessageTask(clientMessage, node, connection)); factories.put( SeaTunnelSubmitJobCodec.REQUEST_MESSAGE_TYPE, (clientMessage, connection) -> new SubmitJobTask(clientMessage, node, connection)); ..... } 클래스를 검사하면 클래스가 호출됩니다. SubmitJobTask SubmitJobOperation @Override protected Operation prepareOperation() { return new SubmitJobOperation( parameters.jobId, parameters.jobImmutableInformation, parameters.isStartWithSavePoint); } 클래스에서 작업 정보는 메서드를 통해 구성 요소에 전달됩니다. SubmitJobOperation submitJob CoordinatorService @Override protected PassiveCompletableFuture<?> doRun() throws Exception { SeaTunnelServer seaTunnelServer = getService(); return seaTunnelServer .getCoordinatorService() .submitJob(jobId, jobImmutableInformation, isStartWithSavePoint); } 이 시점에서 클라이언트 메시지는 메서드 호출을 위해 서버로 효과적으로 전달됩니다. 다른 유형의 작업도 비슷한 방식으로 추적할 수 있습니다. 코디네이터서비스 다음으로, 작업 제출을 처리하는 방식을 살펴보겠습니다. CoordinatorService public PassiveCompletableFuture<Void> submitJob( long jobId, Data jobImmutableInformation, boolean isStartWithSavePoint) { CompletableFuture<Void> jobSubmitFuture = new CompletableFuture<>(); // First, check if a job with the same ID already exists if (getJobMaster(jobId) != null) { logger.warning( String.format( "The job %s is currently running; no need to submit again.", jobId)); jobSubmitFuture.complete(null); return new PassiveCompletableFuture<>(jobSubmitFuture); } // Initialize JobMaster object JobMaster jobMaster = new JobMaster( jobImmutableInformation, this.nodeEngine, executorService, getResourceManager(), getJobHistoryService(), runningJobStateIMap, runningJobStateTimestampsIMap, ownedSlotProfilesIMap, runningJobInfoIMap, metricsImap, engineConfig, seaTunnelServer); executorService.submit( () -> { try { // Ensure no duplicate tasks with the same ID if (!isStartWithSavePoint && getJobHistoryService().getJobMetrics(jobId) != null) { throw new JobException( String.format( "The job id %s has already been submitted and is not starting with a savepoint.", jobId)); } // Add task info to IMAP runningJobInfoIMap.put( jobId, new JobInfo(System.currentTimeMillis(), jobImmutableInformation)); runningJobMasterMap.put(jobId, jobMaster); // Initialize JobMaster jobMaster.init( runningJobInfoIMap.get(jobId).getInitializationTimestamp(), false); // Task creation successful jobSubmitFuture.complete(null); } catch (Throwable e) { String errorMsg = ExceptionUtils.getMessage(e); logger.severe(String.format("submit job %s error %s ", jobId, errorMsg)); jobSubmitFuture.completeExceptionally(new JobException(errorMsg)); } if (!jobSubmitFuture.isCompletedExceptionally()) { // Start job execution try { jobMaster.run(); } finally { // Remove jobMaster from map if not cancelled if (!jobMaster.getJobMasterCompleteFuture().isCancelled()) { runningJobMasterMap.remove(jobId); } } } else { runningJobInfoIMap.remove(jobId); runningJobMasterMap.remove(jobId); } }); return new PassiveCompletableFuture<>(jobSubmitFuture); } 서버에서 객체가 생성되어 개별 작업을 관리합니다. 생성 중에 통해 리소스 관리자를 검색하고 를 통해 작업 기록 정보를 검색합니다. 는 시작 시 초기화되고 첫 번째 작업 제출 시 지연 로드됩니다. JobMaster JobMaster getResourceManager() getJobHistoryService() jobHistoryService ResourceManager /** Lazy load for resource manager */ public ResourceManager getResourceManager() { if (resourceManager == null) { synchronized (this) { if (resourceManager == null) { ResourceManager manager = new ResourceManagerFactory(nodeEngine, engineConfig) .getResourceManager(); manager.init(); resourceManager = manager; } } } return resourceManager; } 리소스매니저 현재 SeaTunnel은 독립형 배포만 지원합니다. 초기화할 때 모든 클러스터 노드를 수집하고 보내 노드 정보를 가져오고 내부 상태를 업데이트합니다. ResourceManager SyncWorkerProfileOperation registerWorker @Override public void init() { log.info("Init ResourceManager"); initWorker(); } private void initWorker() { log.info("initWorker... "); List<Address> aliveNode = nodeEngine.getClusterService().getMembers().stream() .map(Member::getAddress) .collect(Collectors.toList()); log.info("init live nodes: {}", aliveNode); List<CompletableFuture<Void>> futures = aliveNode.stream() .map( node -> sendToMember(new SyncWorkerProfileOperation(), node) .thenAccept( p -> { if (p != null) { registerWorker.put( node, (WorkerProfile) p); log.info( "received new worker register: " + ((WorkerProfile) p) .getAddress()); } })) .collect(Collectors.toList()); futures.forEach(CompletableFuture::join); log.info("registerWorker: {}", registerWorker); } 이전에 각 노드에서 마스터로 주기적으로 하트비트 메시지를 보내는 것을 관찰했습니다. 이러한 하트비트를 수신하면 내부 상태에서 노드 상태를 업데이트합니다. SlotService ResourceManager @Override public void heartbeat(WorkerProfile workerProfile) { if (!registerWorker.containsKey(workerProfile.getAddress())) { log.info("received new worker register: " + workerProfile.getAddress()); sendToMember(new ResetResourceOperation(), workerProfile.getAddress()).join(); } else { log.debug("received worker heartbeat from: " + workerProfile.getAddress()); } registerWorker.put(workerProfile.getAddress(), workerProfile); } 잡마스터 에서 인스턴스가 생성되고 메서드가 호출됩니다. 메서드가 완료되면 작업 생성이 성공한 것으로 간주됩니다. 그런 다음 메서드가 호출되어 작업을 공식적으로 실행합니다. CoordinatorService JobMaster init init run 초기화와 메서드를 살펴보겠습니다. init public JobMaster( @NonNull Data jobImmutableInformationData, @NonNull NodeEngine nodeEngine, @NonNull ExecutorService executorService, @NonNull ResourceManager resourceManager, @NonNull JobHistoryService jobHistoryService, @NonNull IMap runningJobStateIMap, @NonNull IMap runningJobStateTimestampsIMap, @NonNull IMap ownedSlotProfilesIMap, @NonNull IMap<Long, JobInfo> runningJobInfoIMap, @NonNull IMap<Long, HashMap<TaskLocation, SeaTunnelMetricsContext>> metricsImap, EngineConfig engineConfig, SeaTunnelServer seaTunnelServer) { this.jobImmutableInformationData = jobImmutableInformationData; this.nodeEngine = nodeEngine; this.executorService = executorService; flakeIdGenerator = this.nodeEngine .getHazelcastInstance() .getFlakeIdGenerator(Constant.SEATUNNEL_ID_GENERATOR_NAME); this.ownedSlotProfilesIMap = ownedSlotProfilesIMap; this.resourceManager = resourceManager; this.jobHistoryService = jobHistoryService; this.runningJobStateIMap = runningJobStateIMap; this.runningJobStateTimestampsIMap = runningJobStateTimestampsIMap; this.runningJobInfoIMap = runningJobInfoIMap; this.engineConfig = engineConfig; this.metricsImap = metricsImap; this.seaTunnelServer = seaTunnelServer; this.releasedSlotWhenTaskGroupFinished = new ConcurrentHashMap<>(); } 초기화하는 동안에는 중요한 연산 없이 간단한 변수 할당만 수행됩니다. 메서드에 집중해야 합니다. init public synchronized void init(long initializationTimestamp, boolean restart) throws Exception { // The server receives a binary object from the client, // which is first converted to a JobImmutableInformation object, the same object sent by the client jobImmutableInformation = nodeEngine.getSerializationService().toObject(jobImmutableInformationData); // Get the checkpoint configuration, such as the interval, timeout, etc. jobCheckpointConfig = createJobCheckpointConfig( engineConfig.getCheckpointConfig(), jobImmutableInformation.getJobConfig()); LOGGER.info( String.format( "Init JobMaster for Job %s (%s) ", jobImmutableInformation.getJobConfig().getName(), jobImmutableInformation.getJobId())); LOGGER.info( String.format( "Job %s (%s) needed jar urls %s", jobImmutableInformation.getJobConfig().getName(), jobImmutableInformation.getJobId(), jobImmutableInformation.getPluginJarsUrls())); ClassLoader appClassLoader = Thread.currentThread().getContextClassLoader(); // Get the ClassLoader ClassLoader classLoader = seaTunnelServer .getClassLoaderService() .getClassLoader( jobImmutableInformation.getJobId(), jobImmutableInformation.getPluginJarsUrls()); // Deserialize the logical DAG from the client-provided information logicalDag = CustomClassLoadedObject.deserializeWithCustomClassLoader( nodeEngine.getSerializationService(), classLoader, jobImmutableInformation.getLogicalDag()); try { Thread.currentThread().setContextClassLoader(classLoader); // Execute save mode functionality, such as table creation and deletion if (!restart && !logicalDag.isStartWithSavePoint() && ReadonlyConfig.fromMap(logicalDag.getJobConfig().getEnvOptions()) .get(EnvCommonOptions.SAVEMODE_EXECUTE_LOCATION) .equals(SaveModeExecuteLocation.CLUSTER)) { logicalDag.getLogicalVertexMap().values().stream() .map(LogicalVertex::getAction) .filter(action -> action instanceof SinkAction) .map(sink -> ((SinkAction<?, ?, ?, ?>) sink).getSink()) .forEach(JobMaster::handleSaveMode); } // Parse the logical plan into a physical plan final Tuple2<PhysicalPlan, Map<Integer, CheckpointPlan>> planTuple = PlanUtils.fromLogicalDAG( logicalDag, nodeEngine, jobImmutableInformation, initializationTimestamp, executorService, flakeIdGenerator, runningJobStateIMap, runningJobStateTimestampsIMap, engineConfig.getQueueType(), engineConfig); this.physicalPlan = planTuple.f0(); this.physicalPlan.setJobMaster(this); this.checkpointPlanMap = planTuple.f1(); } finally { // Reset the current thread's ClassLoader and release the created classLoader Thread.currentThread().setContextClassLoader(appClassLoader); seaTunnelServer .getClassLoaderService() .releaseClassLoader( jobImmutableInformation.getJobId(), jobImmutableInformation.getPluginJarsUrls()); } Exception initException = null; try { // Initialize the checkpoint manager this.initCheckPointManager(restart); } catch (Exception e) { initException = e; } // Add some callback functions for job state listening this.initStateFuture(); if (initException != null) { if (restart) { cancelJob(); } throw initException; } } 마지막으로 메서드를 살펴보겠습니다. run public void run() { try { physicalPlan.startJob(); } catch (Throwable e) { LOGGER.severe( String.format( "Job %s (%s) run error with: %s", physicalPlan.getJobImmutableInformation().getJobConfig().getName(), physicalPlan.getJobImmutableInformation().getJobId(), ExceptionUtils.getMessage(e))); } finally { jobMasterCompleteFuture.join(); if (engineConfig.getConnectorJarStorageConfig().getEnable()) { List<ConnectorJarIdentifier> pluginJarIdentifiers = jobImmutableInformation.getPluginJarIdentifiers(); seaTunnelServer .getConnectorPackageService() .cleanUpWhenJobFinished( jobImmutableInformation.getJobId(), pluginJarIdentifiers); } } } 이 방법은 상대적으로 간단하며, 호출하여 생성된 물리적 계획을 실행합니다. physicalPlan.startJob() 위 코드에서 알 수 있듯이 서버는 클라이언트 작업 제출 요청을 받은 후 클래스를 초기화하고, 이 클래스가 논리적 계획에서 물리적 계획을 생성한 다음 물리적 계획을 실행합니다. JobMaster 다음으로, 논리적 계획이 물리적 계획으로 어떻게 변환되는지 살펴보겠습니다. 논리적 계획에서 물리적 계획으로 변환 물리적 계획 생성은 에서 다음 메서드를 호출하여 수행됩니다. JobMaster final Tuple2<PhysicalPlan, Map<Integer, CheckpointPlan>> planTuple = PlanUtils.fromLogicalDAG( logicalDag, nodeEngine, jobImmutableInformation, initializationTimestamp, executorService, flakeIdGenerator, runningJobStateIMap, runningJobStateTimestampsIMap, engineConfig.getQueueType(), engineConfig); 물리적 계획을 생성하는 방법에서는 논리적 계획이 먼저 실행 계획으로 변환되고, 그런 다음 실행 계획이 물리적 계획으로 변환됩니다. public static Tuple2<PhysicalPlan, Map<Integer, CheckpointPlan>> fromLogicalDAG( @NonNull LogicalDag logicalDag, @NonNull NodeEngine nodeEngine, @NonNull JobImmutableInformation jobImmutableInformation, long initializationTimestamp, @NonNull ExecutorService executorService, @NonNull FlakeIdGenerator flakeIdGenerator, @NonNull IMap runningJobStateIMap, @NonNull IMap runningJobStateTimestampsIMap, @NonNull QueueType queueType, @NonNull EngineConfig engineConfig) { return new PhysicalPlanGenerator( new ExecutionPlanGenerator( logicalDag, jobImmutableInformation, engineConfig) .generate(), nodeEngine, jobImmutableInformation, initializationTimestamp, executorService, flakeIdGenerator, runningJobStateIMap, runningJobStateTimestampsIMap, queueType) .generate(); } 실행 계획 생성 public ExecutionPlanGenerator( @NonNull LogicalDag logicalPlan, @NonNull JobImmutableInformation jobImmutableInformation, @NonNull EngineConfig engineConfig) { checkArgument( logicalPlan.getEdges().size() > 0, "ExecutionPlan Builder must have LogicalPlan."); this.logicalPlan = logicalPlan; this.jobImmutableInformation = jobImmutableInformation; this.engineConfig = engineConfig; } public ExecutionPlan generate() { log.debug("Generate execution plan using logical plan:"); Set<ExecutionEdge> executionEdges = generateExecutionEdges(logicalPlan.getEdges()); log.debug("Phase 1: generate execution edge list {}", executionEdges); executionEdges = generateShuffleEdges(executionEdges); log.debug("Phase 2: generate shuffle edge list {}", executionEdges); executionEdges = generateTransformChainEdges(executionEdges); log.debug("Phase 3: generate transform chain edge list {}", executionEdges); List<Pipeline> pipelines = generatePipelines(executionEdges); log.debug("Phase 4: generate pipeline list {}", pipelines); ExecutionPlan executionPlan = new ExecutionPlan(pipelines, jobImmutableInformation); log.debug("Phase 5 : generate execution plan {}", executionPlan); return executionPlan; } 클래스는 논리적 계획을 가져와 실행 에지 생성, 에지 셔플, 변환 체인 에지, 마지막으로 파이프라인을 포함한 여러 단계를 거쳐 실행 계획을 생성합니다. ExecutionPlanGenerator 물리적 계획의 생성 클래스는 실행 계획을 물리적 계획으로 변환합니다. PhysicalPlanGenerator public PhysicalPlanGenerator( @NonNull ExecutionPlan executionPlan, @NonNull NodeEngine nodeEngine, @NonNull JobImmutableInformation jobImmutableInformation, long initializationTimestamp, @NonNull ExecutorService executorService, @NonNull FlakeIdGenerator flakeIdGenerator, @NonNull IMap runningJobStateIMap, @NonNull IMap runningJobStateTimestampsIMap, @NonNull QueueType queueType) { this.executionPlan = executionPlan; this.nodeEngine = nodeEngine; this.jobImmutableInformation = jobImmutableInformation; this.initializationTimestamp = initializationTimestamp; this.executorService = executorService; this.flakeIdGenerator = flakeIdGenerator; this.runningJobStateIMap = runningJobStateIMap; this.runningJobStateTimestampsIMap = runningJobStateTimestampsIMap; this.queueType = queueType; } public PhysicalPlan generate() { List<PhysicalVertex> physicalVertices = generatePhysicalVertices(executionPlan); List<PhysicalEdge> physicalEdges = generatePhysicalEdges(executionPlan); PhysicalPlan physicalPlan = new PhysicalPlan(physicalVertices, physicalEdges); log.debug("Generate physical plan: {}", physicalPlan); return physicalPlan; } 두 수업의 내용을 살펴보겠습니다. public class ExecutionPlan { private final List<Pipeline> pipelines; private final JobImmutableInformation jobImmutableInformation; } public class Pipeline { /** The ID of the pipeline. */ private final Integer id; private final List<ExecutionEdge> edges; private final Map<Long, ExecutionVertex> vertexes; } public class ExecutionEdge { private ExecutionVertex leftVertex; private ExecutionVertex rightVertex; } public class ExecutionVertex { private Long vertexId; private Action action; private int parallelism; } 이를 논리적 계획과 비교해 보겠습니다. public class LogicalDag implements IdentifiedDataSerializable { @Getter private JobConfig jobConfig; private final Set<LogicalEdge> edges = new LinkedHashSet<>(); private final Map<Long, LogicalVertex> logicalVertexMap = new LinkedHashMap<>(); private IdGenerator idGenerator; private boolean isStartWithSavePoint = false; } public class LogicalEdge implements IdentifiedDataSerializable { private LogicalVertex inputVertex; private LogicalVertex targetVertex; private Long inputVertexId; private Long targetVertexId; } public class LogicalVertex implements IdentifiedDataSerializable { private Long vertexId; private Action action; private int parallelism; } 각 파이프라인은 논리적 계획과 유사한 듯합니다. 왜 이 변환 단계가 필요한가요? 논리적 계획을 생성하는 과정을 자세히 살펴보겠습니다. 위에서 보았듯이 실행 계획을 생성하는 데는 5단계가 포함되며, 각 단계를 하나씩 살펴보겠습니다. 1단계: 논리적 계획을 실행 계획으로 변환 // Input is a set of logical plan edges, where each edge stores upstream and downstream nodes private Set<ExecutionEdge> generateExecutionEdges(Set<LogicalEdge> logicalEdges) { Set<ExecutionEdge> executionEdges = new LinkedHashSet<>(); Map<Long, ExecutionVertex> logicalVertexIdToExecutionVertexMap = new HashMap(); // Sort in order: first by input node, then by output node List<LogicalEdge> sortedLogicalEdges = new ArrayList<>(logicalEdges); Collections.sort( sortedLogicalEdges, (o1, o2) -> { if (o1.getInputVertexId() != o2.getInputVertexId()) { return o1.getInputVertexId() > o2.getInputVertexId() ? 1 : -1; } if (o1.getTargetVertexId() != o2.getTargetVertexId()) { return o1.getTargetVertexId() > o2.getTargetVertexId() ? 1 : -1; } return 0; }); // Loop to convert each logical plan edge to an execution plan edge for (LogicalEdge logicalEdge : sortedLogicalEdges) { LogicalVertex logicalInputVertex = logicalEdge.getInputVertex(); ExecutionVertex executionInputVertex = logicalVertexIdToExecutionVertexMap.computeIfAbsent( logicalInputVertex.getVertexId(), vertexId -> { long newId = idGenerator.getNextId(); // Recreate Action for each logical plan node Action newLogicalInputAction = recreateAction( logicalInputVertex.getAction(), newId, logicalInputVertex.getParallelism()); // Convert to execution plan node return new ExecutionVertex( newId, newLogicalInputAction, logicalInputVertex.getParallelism()); }); // Similarly, recreate execution plan nodes for target nodes LogicalVertex logicalTargetVertex = logicalEdge.getTargetVertex(); ExecutionVertex executionTargetVertex = logicalVertexIdToExecutionVertexMap.computeIfAbsent( logicalTargetVertex.getVertexId(), vertexId -> { long newId = idGenerator.getNextId(); Action newLogicalTargetAction = recreateAction( logicalTargetVertex.getAction(), newId, logicalTargetVertex.getParallelism()); return new ExecutionVertex( newId, newLogicalTargetAction, logicalTargetVertex.getParallelism()); }); // Generate execution plan edge ExecutionEdge executionEdge = new ExecutionEdge(executionInputVertex, executionTargetVertex); executionEdges.add(executionEdge); } return executionEdges; } 2단계 private Set<ExecutionEdge> generateShuffleEdges(Set<ExecutionEdge> executionEdges) { // Map of upstream node ID to list of downstream nodes Map<Long, List<ExecutionVertex>> targetVerticesMap = new LinkedHashMap<>(); // Store only nodes of type Source Set<ExecutionVertex> sourceExecutionVertices = new HashSet<>(); executionEdges.forEach( edge -> { ExecutionVertex leftVertex = edge.getLeftVertex(); ExecutionVertex rightVertex = edge.getRightVertex(); if (leftVertex.getAction() instanceof SourceAction) { sourceExecutionVertices.add(leftVertex); } targetVerticesMap .computeIfAbsent(leftVertex.getVertexId(), id -> new ArrayList<>()) .add(rightVertex); }); if (sourceExecutionVertices.size() != 1) { return executionEdges; } ExecutionVertex sourceExecutionVertex = sourceExecutionVertices.stream().findFirst().get(); Action sourceAction = sourceExecutionVertex.getAction(); List<CatalogTable> producedCatalogTables = new ArrayList<>(); if (sourceAction instanceof SourceAction) { try { producedCatalogTables = ((SourceAction<?, ?, ?>) sourceAction) .getSource() .getProducedCatalogTables(); } catch (UnsupportedOperationException e) { } } else if (sourceAction instanceof TransformChainAction) { return executionEdges; } else { throw new SeaTunnelException( "source action must be SourceAction or TransformChainAction"); } // If the source produces a single table or // the source has only one downstream output, return directly if (producedCatalogTables.size() <= 1 || targetVerticesMap.get(sourceExecutionVertex.getVertexId()).size() <= 1) { return executionEdges; } List<ExecutionVertex> sinkVertices = targetVerticesMap.get(sourceExecutionVertex.getVertexId()); // Check if there are other types of actions, currently downstream nodes should ideally have two types: Transform and Sink; here we check if only Sink type is present Optional<ExecutionVertex> hasOtherAction = sinkVertices.stream() .filter(vertex -> !(vertex.getAction() instanceof SinkAction)) .findFirst(); checkArgument(!hasOtherAction.isPresent()); // After executing the above code, the current scenario is: // There is only one data source, this source produces multiple tables, and multiple sink nodes depend on these tables // This means the task has only two types of nodes: a source node that produces multiple tables and a group of sink nodes depending on this source // A new shuffle node will be created and added between the source and sinks // Modify the dependency relationship to source -> shuffle -> multiple sinks Set<ExecutionEdge> newExecutionEdges = new LinkedHashSet<>(); // Shuffle strategy will not be explored in detail here ShuffleStrategy shuffleStrategy = ShuffleMultipleRowStrategy.builder() .jobId(jobImmutableInformation.getJobId()) .inputPartitions(sourceAction.getParallelism()) .catalogTables(producedCatalogTables) .queueEmptyQueueTtl( (int) (engineConfig.getCheckpointConfig().getCheckpointInterval() * 3)) .build(); ShuffleConfig shuffleConfig = ShuffleConfig.builder().shuffleStrategy(shuffleStrategy).build(); long shuffleVertexId = idGenerator.getNextId(); String shuffleActionName = String.format("Shuffle [%s]", sourceAction.getName()); ShuffleAction shuffleAction = new ShuffleAction(shuffleVertexId, shuffleActionName, shuffleConfig); shuffleAction.setParallelism(sourceAction.getParallelism()); ExecutionVertex shuffleVertex = new ExecutionVertex(shuffleVertexId, shuffleAction, shuffleAction.getParallelism()); ExecutionEdge sourceToShuffleEdge = new ExecutionEdge(sourceExecutionVertex, shuffleVertex); newExecutionEdges.add(sourceToShuffleEdge); // Set the parallelism of multiple sink nodes to 1 for (ExecutionVertex sinkVertex : sinkVertices) { sinkVertex.setParallelism(1); sinkVertex.getAction().setParallelism(1); ExecutionEdge shuffleToSinkEdge = new ExecutionEdge(shuffleVertex, sinkVertex); newExecutionEdges.add(shuffleToSinkEdge); } return newExecutionEdges; } Shuffle 단계는 소스가 여러 테이블 읽기를 지원하고 이 소스에 따라 여러 싱크 노드가 있는 특정 시나리오를 다룹니다. 이러한 경우 Shuffle 노드가 그 사이에 추가됩니다. 3단계 private Set<ExecutionEdge> generateTransformChainEdges(Set<ExecutionEdge> executionEdges) { // Uses three structures: stores all Source nodes and the input/output nodes for each // inputVerticesMap stores all upstream input nodes by downstream node id as the key // targetVerticesMap stores all downstream output nodes by upstream node id as the key Map<Long, List<ExecutionVertex>> inputVerticesMap = new HashMap<>(); Map<Long, List<ExecutionVertex>> targetVerticesMap = new HashMap<>(); Set<ExecutionVertex> sourceExecutionVertices = new HashSet<>(); executionEdges.forEach( edge -> { ExecutionVertex leftVertex = edge.getLeftVertex(); ExecutionVertex rightVertex = edge.getRightVertex(); if (leftVertex.getAction() instanceof SourceAction) { sourceExecutionVertices.add(leftVertex); } inputVerticesMap .computeIfAbsent(rightVertex.getVertexId(), id -> new ArrayList<>()) .add(leftVertex); targetVerticesMap .computeIfAbsent(leftVertex.getVertexId(), id -> new ArrayList<>()) .add(rightVertex); }); Map<Long, ExecutionVertex> transformChainVertexMap = new HashMap<>(); Map<Long, Long> chainedTransformVerticesMapping = new HashMap<>(); // Loop over each source, starting with all head nodes in the DAG for (ExecutionVertex sourceVertex : sourceExecutionVertices) { List<ExecutionVertex> vertices = new ArrayList<>(); vertices.add(sourceVertex); for (int index = 0; index < vertices.size(); index++) { ExecutionVertex vertex = vertices.get(index); fillChainedTransformExecutionVertex( vertex, chainedTransformVerticesMapping, transformChainVertexMap, executionEdges, Collections.unmodifiableMap(inputVerticesMap), Collections.unmodifiableMap(targetVerticesMap)); // If the current node has downstream nodes, add all downstream nodes to the list // The second loop will recalculate the newly added downstream nodes, which could be Transform nodes or Sink nodes if (targetVerticesMap.containsKey(vertex.getVertexId())) { vertices.addAll(targetVerticesMap.get(vertex.getVertexId())); } } } // After looping, chained Transform nodes will be chained, and the chainable edges will be removed from the execution plan // Therefore, the logical plan at this point cannot form the graph relationship and needs to be rebuilt Set<ExecutionEdge> transformChainEdges = new LinkedHashSet<>(); // Loop over existing relationships for (ExecutionEdge executionEdge : executionEdges) { ExecutionVertex leftVertex = executionEdge.getLeftVertex(); ExecutionVertex rightVertex = executionEdge.getRightVertex(); boolean needRebuild = false; // Check if the input or output nodes of the current edge are in the chain mapping // If so, the node has been chained, and we need to find the chained node in the mapping // and rebuild the DAG if (chainedTransformVerticesMapping.containsKey(leftVertex.getVertexId())) { needRebuild = true; leftVertex = transformChainVertexMap.get( chainedTransformVerticesMapping.get(leftVertex.getVertexId())); } if (chainedTransformVerticesMapping.containsKey(rightVertex.getVertexId())) { needRebuild = true; rightVertex = transformChainVertexMap.get( chainedTransformVerticesMapping.get(rightVertex.getVertexId())); } if (needRebuild) { executionEdge = new ExecutionEdge(leftVertex, rightVertex); } transformChainEdges.add(executionEdge); } return transformChainEdges; } private void fillChainedTransformExecutionVertex( ExecutionVertex currentVertex, Map<Long, Long> chainedTransformVerticesMapping, Map<Long, ExecutionVertex> transformChainVertexMap, Set<ExecutionEdge> executionEdges, Map<Long, List<ExecutionVertex>> inputVerticesMap, Map<Long, List<ExecutionVertex>> targetVerticesMap) { // Exit if the map already contains the current node if (chainedTransformVerticesMapping.containsKey(currentVertex.getVertexId())) { return; } List<ExecutionVertex> transformChainedVertices = new ArrayList<>(); collectChainedVertices( currentVertex, transformChainedVertices, executionEdges, inputVerticesMap, targetVerticesMap); // If the list is not empty, it means the Transform nodes in the list can be merged into one if (transformChainedVertices.size() > 0) { long newVertexId = idGenerator.getNextId(); List<SeaTunnelTransform> transforms = new ArrayList<>(transformChainedVertices.size()); List<String> names = new ArrayList<>(transformChainedVertices.size()); Set<URL> jars = new HashSet<>(); Set<ConnectorJarIdentifier> identifiers = new HashSet<>(); transformChainedVertices.stream() .peek( // Add all historical node IDs and new node IDs to the mapping vertex -> chainedTransformVerticesMapping.put( vertex.getVertexId(), newVertexId)) .map(ExecutionVertex::getAction) .map(action -> (TransformAction) action) .forEach( action -> { transforms.add(action.getTransform()); jars.addAll(action.getJarUrls()); identifiers.addAll(action.getConnectorJarIdentifiers()); names.add(action.getName()); }); String transformChainActionName = String.format("TransformChain[%s]", String.join("->", names)); // Merge multiple TransformActions into one TransformChainAction TransformChainAction transformChainAction = new TransformChainAction( newVertexId, transformChainActionName, jars, identifiers, transforms); transformChainAction.setParallelism(currentVertex.getAction().getParallelism()); ExecutionVertex executionVertex = new ExecutionVertex( newVertexId, transformChainAction, currentVertex.getParallelism()); // Store the modified node information in the state transformChainVertexMap.put(newVertexId, executionVertex); chainedTransformVerticesMapping.put( currentVertex.getVertexId(), executionVertex.getVertexId()); } } private void collectChainedVertices( ExecutionVertex currentVertex, List<ExecutionVertex> chainedVertices, Set<ExecutionEdge> executionEdges, Map<Long, List<ExecutionVertex>> inputVerticesMap, Map<Long, List<ExecutionVertex>> targetVerticesMap) { Action action = currentVertex.getAction(); // Only merge TransformAction if (action instanceof TransformAction) { if (chainedVertices.size() == 0) { // If the list of vertices to be merged is empty, add itself to the list // The condition for entering this branch is that the current node is a TransformAction and the list to be merged is empty // There may be several scenarios: the first Transform node enters, and this Transform node has no constraints chainedVertices.add(currentVertex); } else if (inputVerticesMap.get(currentVertex.getVertexId()).size() == 1) { // When this condition is entered, it means: // The list of vertices to be merged already has at least one TransformAction // The scenario at this point is that the upstream Transform node has only one downstream node, ie, the current node. This constraint is ensured by the following judgment // Chain the current TransformAction node with the previous TransformAction node // Delete this relationship from the execution plan executionEdges.remove( new ExecutionEdge( chainedVertices.get(chainedVertices.size() - 1), currentVertex)); // Add itself to the list of nodes to be merged chainedVertices.add(currentVertex); } else { return; } } else { return; } // It cannot chain to any target vertex if it has multiple target vertices. if (targetVerticesMap.get(currentVertex.getVertexId()).size() == 1) { // If the current node has only one downstream node, try chaining again // If the current node has multiple downstream nodes, it will not chain the downstream nodes, so it can be ensured that the above chaining is a one-to-one relationship // This call occurs when the Transform node has only one downstream node collectChainedVertices( targetVerticesMap.get(currentVertex.getVertexId()).get(0), chainedVertices, executionEdges, inputVerticesMap, targetVerticesMap); } } 4단계 private List<Pipeline> generatePipelines(Set<ExecutionEdge> executionEdges) { // Stores each execution plan node Set<ExecutionVertex> executionVertices = new LinkedHashSet<>(); for (ExecutionEdge edge : executionEdges) { executionVertices.add(edge.getLeftVertex()); executionVertices.add(edge.getRightVertex()); } // Calls the Pipeline generator to convert the execution plan into Pipelines PipelineGenerator pipelineGenerator = new PipelineGenerator(executionVertices, new ArrayList<>(executionEdges)); List<Pipeline> pipelines = pipelineGenerator.generatePipelines(); Set<String> duplicatedActionNames = new HashSet<>(); Set<String> actionNames = new HashSet<>(); for (Pipeline pipeline : pipelines) { Integer pipelineId = pipeline.getId(); for (ExecutionVertex vertex : pipeline.getVertexes().values()) { // Get each execution node of the current Pipeline, reset the Action name, and add the pipeline name Action action = vertex.getAction(); String actionName = String.format("pipeline-%s [%s]", pipelineId, action.getName()); action.setName(actionName); if (actionNames.contains(actionName)) { duplicatedActionNames.add(actionName); } actionNames.add(action Name); } } if (duplicatedActionNames.size() > 0) { throw new RuntimeException( String.format( "Duplicated Action names found: %s", duplicatedActionNames)); } return pipelines; } public PipelineGenerator(Collection<ExecutionVertex> vertices, List<ExecutionEdge> edges) { this.vertices = vertices; this.edges = edges; } public List<Pipeline> generatePipelines() { List<ExecutionEdge> executionEdges = expandEdgeByParallelism(edges); // Split the execution plan into unrelated execution plans based on their relationships // Divide into several unrelated execution plans List<List<ExecutionEdge>> edgesList = splitUnrelatedEdges(executionEdges); edgesList = edgesList.stream() .flatMap(e -> this.splitUnionEdge(e).stream()) .collect(Collectors.toList()); // Just convert execution plan to pipeline at now. We should split it to multi pipeline with // cache in the future IdGenerator idGenerator = new IdGenerator(); // Convert execution plan graph to Pipeline return edgesList.stream() .map( e -> { Map<Long, ExecutionVertex> vertexes = new HashMap<>(); List<ExecutionEdge> pipelineEdges = e.stream() .map( edge -> { if (!vertexes.containsKey( edge.getLeftVertexId())) { vertexes.put( edge.getLeftVertexId(), edge.getLeftVertex()); } ExecutionVertex source = vertexes.get( edge.getLeftVertexId()); if (!vertexes.containsKey( edge.getRightVertexId())) { vertexes.put( edge.getRightVertexId(), edge.getRightVertex()); } ExecutionVertex destination = vertexes.get( edge.getRightVertexId()); return new ExecutionEdge( source, destination); }) .collect(Collectors.toList()); return new Pipeline( (int) idGenerator.getNextId(), pipelineEdges, vertexes); }) .collect(Collectors.toList()); } 5단계 5단계는 실행 계획 인스턴스를 생성하고 4단계에서 생성한 파이프라인 매개변수를 전달하는 것입니다. 요약: 실행 계획은 논리적 계획에 대해 다음 작업을 수행합니다. 소스가 여러 개의 테이블을 생성하고 여러 개의 싱크 노드가 이 소스에 의존하는 경우, 셔플 노드가 그 사이에 추가됩니다. 여러 개의 변환 노드를 하나의 노드로 결합하여 체인 병합 변환 노드를 시도합니다. 작업을 분할하고, 으로 표현된 여러 개의 관련 없는 작업으로 나눕니다. configuration file/LogicalDag List<Pipeline> 물리적 계획 생성 물리적 계획 생성에 들어가기 전에, 생성된 물리적 계획에 어떤 정보가 포함되어 있는지 먼저 검토하고 내부 구성 요소를 살펴보겠습니다. public class PhysicalPlan { private final List<SubPlan> pipelineList; private final AtomicInteger finishedPipelineNum = new AtomicInteger(0); private final AtomicInteger canceledPipelineNum = new AtomicInteger(0); private final AtomicInteger failedPipelineNum = new AtomicInteger(0); private final JobImmutableInformation jobImmutableInformation; private final IMap<Object, Object> runningJobStateIMap; private final IMap<Object, Long[]> runningJobStateTimestampsIMap; private CompletableFuture<JobResult> jobEndFuture; private final AtomicReference<String> errorBySubPlan = new AtomicReference<>(); private final String jobFullName; private final long jobId; private JobMaster jobMaster; private boolean makeJobEndWhenPipelineEnded = true; private volatile boolean isRunning = false; } 이 클래스에서 주요 필드는 인스턴스의 목록인 입니다. SubPlan pipelineList public class SubPlan { private final int pipelineMaxRestoreNum; private final int pipelineRestoreIntervalSeconds; private final List<PhysicalVertex> physicalVertexList; private final List<PhysicalVertex> coordinatorVertexList; private final int pipelineId; private final AtomicInteger finishedTaskNum = new AtomicInteger(0); private final AtomicInteger canceledTaskNum = new AtomicInteger(0); private final AtomicInteger failedTaskNum = new AtomicInteger(0); private final String pipelineFullName; private final IMap<Object, Object> runningJobStateIMap; private final Map<String, String> tags; private final IMap<Object, Long[]> runningJobStateTimestampsIMap; private CompletableFuture<PipelineExecutionState> pipelineFuture; private final PipelineLocation pipelineLocation; private AtomicReference<String> errorByPhysicalVertex = new AtomicReference<>(); private final ExecutorService executorService; private JobMaster jobMaster; private PassiveCompletableFuture<Void> reSchedulerPipelineFuture; private Integer pipelineRestoreNum; private final Object restoreLock = new Object(); private volatile PipelineStatus currPipelineStatus; public volatile boolean isRunning = false; private Map<TaskGroupLocation, SlotProfile> slotProfiles; } 클래스는 물리적 계획 노드와 코디네이터 노드로 구분된 인스턴스 목록을 유지 관리합니다. SubPlan PhysicalVertex public class PhysicalVertex { private final TaskGroupLocation taskGroupLocation; private final String taskFullName; private final TaskGroupDefaultImpl taskGroup; private final ExecutorService executorService; private final FlakeIdGenerator flakeIdGenerator; private final Set<URL> pluginJarsUrls; private final Set<ConnectorJarIdentifier> connectorJarIdentifiers; private final IMap<Object, Object> runningJobStateIMap; private CompletableFuture<TaskExecutionState> taskFuture; private final IMap<Object, Long[]> runningJobStateTimestampsIMap; private final NodeEngine nodeEngine; private JobMaster jobMaster; private volatile ExecutionState currExecutionState = ExecutionState.CREATED; public volatile boolean isRunning = false; private AtomicReference<String> errorByPhysicalVertex = new AtomicReference<>(); } public class TaskGroupDefaultImpl implements TaskGroup { private final TaskGroupLocation taskGroupLocation; private final String taskGroupName; // Stores the tasks that the physical node needs to execute // Each task could be for reading data, writing data, data splitting, checkpoint tasks, etc. private final Map<Long, Task> tasks; } 는 실행 계획을 로 변환하고 실행 중에 데이터 분할, 데이터 커밋, 체크포인트 작업과 같은 다양한 조정 작업을 추가하는 역할을 합니다. PhysicalPlanGenerator SeaTunnelTask public PhysicalPlanGenerator( @NonNull ExecutionPlan executionPlan, @NonNull NodeEngine nodeEngine, @NonNull JobImmutableInformation jobImmutableInformation, long initializationTimestamp, @NonNull ExecutorService executorService, @NonNull FlakeIdGenerator flakeIdGenerator, @NonNull IMap runningJobStateIMap, @NonNull IMap runningJobStateTimestampsIMap, @NonNull QueueType queueType) { this.pipelines = executionPlan.getPipelines(); this.nodeEngine = nodeEngine; this.jobImmutableInformation = jobImmutableInformation; this.initializationTimestamp = initializationTimestamp; this.executorService = executorService; this.flakeIdGenerator = flakeIdGenerator; // the checkpoint of a pipeline this.pipelineTasks = new HashSet<>(); this.startingTasks = new HashSet<>(); this.subtaskActions = new HashMap<>(); this.runningJobStateIMap = runningJobStateIMap; this.runningJobStateTimestampsIMap = runningJobStateTimestampsIMap; this.queueType = queueType; } public Tuple2<PhysicalPlan, Map<Integer, CheckpointPlan>> generate() { // Get the node filter conditions from user configuration to select the nodes where tasks will run Map<String, String> tagFilter = (Map<String, String>) jobImmutableInformation .getJobConfig() .getEnvOptions() .get(EnvCommonOptions.NODE_TAG_FILTER.key()); // TODO Determine which tasks do not need to be restored according to state CopyOnWriteArrayList<PassiveCompletableFuture<PipelineStatus>> waitForCompleteBySubPlanList = new CopyOnWriteArrayList<>(); Map<Integer, CheckpointPlan> checkpointPlans = new HashMap<>(); final int totalPipelineNum = pipelines.size(); Stream<SubPlan> subPlanStream = pipelines.stream() .map( pipeline -> { // Clear the state each time this.pipelineTasks.clear(); this.startingTasks.clear(); this.subtaskActions.clear(); final int pipelineId = pipeline.getId(); // Get current task information final List<ExecutionEdge> edges = pipeline.getEdges(); // Get all SourceActions List<SourceAction<?, ?, ?>> sources = findSourceAction(edges); // Generate Source data slice tasks, ie, SourceSplitEnumeratorTask // This task calls the SourceSplitEnumerator class in the connector if supported List<PhysicalVertex> coordinatorVertexList = getEnumeratorTask( sources, pipelineId, totalPipelineNum); // Generate Sink commit tasks, ie, SinkAggregatedCommitterTask // This task calls the SinkAggregatedCommitter class in the connector if supported // These two tasks are executed as coordination tasks coordinatorVertexList.addAll( getCommitterTask(edges, pipelineId, totalPipelineNum)); List<PhysicalVertex> physicalVertexList = getSourceTask( edges, sources, pipelineId, totalPipelineNum); // physicalVertexList.addAll( getShuffleTask(edges, pipelineId, totalPipelineNum)); CompletableFuture<PipelineStatus> pipelineFuture = new CompletableFuture<>(); waitForCompleteBySubPlanList.add( new PassiveCompletableFuture<>(pipelineFuture)); // Add checkpoint tasks checkpointPlans.put( pipelineId, CheckpointPlan.builder() .pipelineId(pipelineId) .pipelineSubtasks(pipelineTasks) .startingSubtasks(startingTasks) .pipelineActions(pipeline.getActions()) .subtaskActions(subtaskActions) .build()); return new SubPlan( pipelineId, totalPipelineNum, initializationTimestamp, physicalVertexList, coordinatorVertexList, jobImmutableInformation, executorService, runningJobStateIMap, runningJobStateTimestampsIMap, tagFilter); }); PhysicalPlan physicalPlan = new PhysicalPlan( subPlanStream.collect(Collectors.toList()), executorService, jobImmutableInformation, initializationTimestamp, runningJobStateIMap, runningJobStateTimestampsIMap); return Tuple2.tuple2(physicalPlan, checkpointPlans); } 물리적 계획을 생성하는 과정에는 실행 계획을 로 변환하고 데이터 분할 작업, 데이터 커밋 작업, 체크포인트 작업과 같은 다양한 조정 작업을 추가하는 것이 포함됩니다. SeaTunnelTask 에서 작업은 , , , , 로 변환됩니다. SeaTunnelTask SourceFlowLifeCycle SinkFlowLifeCycle TransformFlowLifeCycle ShuffleSinkFlowLifeCycle ShuffleSourceFlowLifeCycle 예를 들어, 및 클래스는 다음과 같습니다. SourceFlowLifeCycle SinkFlowLifeCycle 소스플로우라이프사이클 @Override public void init() throws Exception { this.splitSerializer = sourceAction.getSource().getSplitSerializer(); this.reader = sourceAction .getSource() .createReader( new SourceReaderContext( indexID, sourceAction.getSource().getBoundedness(), this, metricsContext, eventListener)); this.enumeratorTaskAddress = getEnumeratorTaskAddress(); } @Override public void open() throws Exception { reader.open(); register(); } public void collect() throws Exception { if (!prepareClose) { if (schemaChanging()) { log.debug("schema is changing, stop reader collect records"); Thread.sleep(200); return; } reader.pollNext(collector); if (collector.isEmptyThisPollNext()) { Thread.sleep(100); } else { collector.resetEmptyThisPollNext(); /** * The current thread obtain a checkpoint lock in the method {@link * SourceReader#pollNext( Collector)}. When trigger the checkpoint or savepoint, * other threads try to obtain the lock in the method {@link * SourceFlowLifeCycle#triggerBarrier(Barrier)}. When high CPU load, checkpoint * process may be blocked as long time. So we need sleep to free the CPU. */ Thread.sleep(0L); } if (collector.captureSchemaChangeBeforeCheckpointSignal()) { if (schemaChangePhase.get() != null) { throw new IllegalStateException( "previous schema changes in progress, schemaChangePhase: " + schemaChangePhase.get()); } schemaChangePhase.set(SchemaChangePhase.createBeforePhase()); runningTask.triggerSchemaChangeBeforeCheckpoint().get(); log.info("triggered schema-change-before checkpoint, stopping collect data"); } else if (collector.captureSchemaChangeAfterCheckpointSignal()) { if (schemaChangePhase.get() != null) { throw new IllegalStateException( "previous schema changes in progress, schemaChangePhase: " + schemaChangePhase.get()); } schemaChangePhase.set(SchemaChangePhase.createAfterPhase()); runningTask.triggerSchemaChangeAfterCheckpoint().get(); log.info("triggered schema-change-after checkpoint, stopping collect data"); } } else { Thread.sleep(100); } } 에서 데이터 읽기는 메서드에서 수행됩니다. 데이터가 읽히면 에 배치됩니다. 데이터가 수신되면 수집기가 메트릭을 업데이트하고 데이터를 다운스트림 구성 요소로 보냅니다. SourceFlowLifeCycle collect SeaTunnelSourceCollector @Override public void collect(T row) { try { if (row instanceof SeaTunnelRow) { String tableId = ((SeaTunnelRow) row).getTableId(); int size; if (rowType instanceof SeaTunnelRowType) { size = ((SeaTunnelRow) row).getBytesSize((SeaTunnelRowType) rowType); } else if (rowType instanceof MultipleRowType) { size = ((SeaTunnelRow) row).getBytesSize(rowTypeMap.get(tableId)); } else { throw new SeaTunnelEngineException( "Unsupported row type: " + rowType.getClass().getName()); } sourceReceivedBytes.inc(size); sourceReceivedBytesPerSeconds.markEvent(size); flowControlGate.audit((SeaTunnelRow) row); if (StringUtils.isNotEmpty(tableId)) { String tableName = getFullName(TablePath.of(tableId)); Counter sourceTableCounter = sourceReceivedCountPerTable.get(tableName); if (Objects.nonNull(sourceTableCounter)) { sourceTableCounter.inc(); } else { Counter counter = metricsContext.counter(SOURCE_RECEIVED_COUNT + "#" + tableName); counter.inc(); sourceReceivedCountPerTable.put(tableName, counter); } } } sendRecordToNext(new Record<>(row)); emptyThisPollNext = false; sourceReceivedCount.inc(); sourceReceivedQPS.markEvent(); } catch (IOException e) { throw new RuntimeException(e); } } public void sendRecordToNext(Record<?> record) throws IOException { synchronized (checkpointLock) { for (OneInputFlowLifeCycle<Record<?>> output : outputs) { output.received(record); } } } 싱크플로우라이프사이클 @Override public void received(Record<?> record) { try { if (record.getData() instanceof Barrier) { long startTime = System.currentTimeMillis(); Barrier barrier = (Barrier) record.getData(); if (barrier.prepareClose(this.taskLocation)) { prepareClose = true; } if (barrier.snapshot()) { try { lastCommitInfo = writer.prepareCommit(); } catch (Exception e) { writer.abortPrepare(); throw e; } List<StateT> states = writer.snapshotState(barrier.getId()); if (!writerStateSerializer.isPresent()) { runningTask.addState( barrier, ActionStateKey.of(sinkAction), Collections.emptyList()); } else { runningTask.addState( barrier, ActionStateKey.of(sinkAction), serializeStates(writerStateSerializer.get(), states)); } if (containAggCommitter) { CommitInfoT commitInfoT = null; if (lastCommitInfo.isPresent()) { commitInfoT = lastCommitInfo.get(); } runningTask .getExecutionContext() .sendToMember( new SinkPrepareCommitOperation<CommitInfoT>( barrier, committerTaskLocation, commitInfoSerializer.isPresent() ? commitInfoSerializer .get() .serialize(commitInfoT) : null), committerTaskAddress) .join(); } } else { if (containAggCommitter) { runningTask .getExecutionContext() .sendToMember( new BarrierFlowOperation(barrier, committerTaskLocation), committerTaskAddress) .join(); } } runningTask.ack(barrier); log.debug( "trigger barrier [{}] finished, cost {}ms. taskLocation [{}]", barrier.getId(), System.currentTimeMillis() - startTime, taskLocation); } else if (record.getData() instanceof SchemaChangeEvent) { if (prepareClose) { return; } SchemaChangeEvent event = (SchemaChangeEvent) record.getData(); writer.applySchemaChange(event); } else { if (prepareClose) { return; } writer.write((T) record.getData()); sinkWriteCount.inc(); sinkWriteQPS.markEvent(); if (record.getData() instanceof SeaTunnelRow) { long size = ((SeaTunnelRow) record.getData()).getBytesSize(); sinkWriteBytes.inc(size); sinkWriteBytesPerSeconds.markEvent(size); String tableId = ((SeaTunnelRow) record.getData()).getTableId(); if (StringUtils.isNotBlank(tableId)) { String tableName = getFullName(TablePath.of(tableId)); Counter sinkTableCounter = sinkWriteCountPerTable.get(tableName); if (Objects.nonNull(sinkTableCounter)) { sinkTableCounter.inc(); } else { Counter counter = metricsContext.counter(SINK_WRITE_COUNT + "#" + tableName); counter.inc(); sinkWriteCountPerTable.put(tableName, counter); } } } } } catch (Exception e) { throw new RuntimeException(e); } } 작업 실행 에서 메서드를 통해 물리적 계획이 생성되고, 그 후 메서드가 호출되어 실제로 작업을 시작합니다. CoordinatorService init run CoordinatorService { jobMaster.init( runningJobInfoIMap.get(jobId).getInitializationTimestamp(), false); ... jobMaster.run(); } JobMaster { public void run() { ... physicalPlan.startJob(); ... } } 에서 작업을 시작할 때 의 메서드를 호출합니다. JobMaster PhysicalPlan startJob public void startJob() { isRunning = true; log.info("{} state process is start", getJobFullName()); stateProcess(); } private synchronized void stateProcess() { if (!isRunning) { log.warn(String.format("%s state process is stopped", jobFullName)); return; } switch (getJobStatus()) { case CREATED: updateJobState(JobStatus.SCHEDULED); break; case SCHEDULED: getPipelineList() .forEach( subPlan -> { if (PipelineStatus.CREATED.equals( subPlan.getCurrPipelineStatus())) { subPlan.startSubPlanStateProcess(); } }); updateJobState(JobStatus.RUNNING); break; case RUNNING: case DOING_SAVEPOINT: break; case FAILING: case CANCELING: jobMaster.neverNeedRestore(); getPipelineList().forEach(SubPlan::cancelPipeline); break; case FAILED: case CANCELED: case SAVEPOINT_DONE: case FINISHED: stopJobStateProcess(); jobEndFuture.complete(new JobResult(getJobStatus(), errorBySubPlan.get())); return; default: throw new IllegalArgumentException("Unknown Job State: " + getJobStatus()); } } 에서 작업을 시작하면 작업 상태가 로 업데이트되고 의 시작 메서드가 계속 호출됩니다. PhysicalPlan SCHEDULED SubPlan public void startSubPlanStateProcess() { isRunning = true; log.info("{} state process is start", getPipelineFullName()); stateProcess(); } private synchronized void stateProcess() { if (!isRunning) { log.warn(String.format("%s state process not start", pipelineFullName)); return; } PipelineStatus state = getCurrPipelineStatus(); switch (state) { case CREATED: updatePipelineState(PipelineStatus.SCHEDULED); break; case SCHEDULED: try { ResourceUtils.applyResourceForPipeline(jobMaster.getResourceManager(), this); log.debug( "slotProfiles: {}, PipelineLocation: {}", slotProfiles, this.getPipelineLocation()); updatePipelineState(PipelineStatus.DEPLOYING); } catch (Exception e) { makePipelineFailing(e); } break; case DEPLOYING: coordinatorVertexList.forEach( task -> { if (task.getExecutionState().equals(ExecutionState.CREATED)) { task.startPhysicalVertex(); task.makeTaskGroupDeploy(); } }); physicalVertexList.forEach( task -> { if (task.getExecutionState().equals(ExecutionState.CREATED)) { task.startPhysicalVertex(); task.makeTaskGroupDeploy(); } }); updatePipelineState(PipelineStatus.RUNNING); break; case RUNNING: break; case FAILING: case CANCELING: coordinatorVertexList.forEach( task -> { task.startPhysicalVertex(); task.cancel(); }); physicalVertexList.forEach( task -> { task.startPhysicalVertex(); task.cancel(); }); break; case FAILED: case CANCELED: if (checkNeedRestore(state) && prepareRestorePipeline()) { jobMaster.releasePipelineResource(this); restorePipeline(); return; } subPlanDone(state); stopSubPlanStateProcess(); pipelineFuture.complete( new PipelineExecutionState(pipelineId, state, errorByPhysicalVertex.get())); return; case FINISHED: subPlanDone(state); stopSubPlanStateProcess(); pipelineFuture.complete( new PipelineExecutionState( pipelineId, getPipelineState(), errorByPhysicalVertex.get())); return; default: throw new IllegalArgumentException("Unknown Pipeline State: " + getPipelineState()); } } 에서 리소스는 모든 작업에 적용됩니다. 리소스 적용은 통해 수행됩니다. 리소스 적용 중에 노드는 사용자 정의 태그를 기반으로 선택되어 작업이 특정 노드에서 실행되고 리소스 격리가 달성되도록 합니다. SubPlan ResourceManager public static void applyResourceForPipeline( @NonNull ResourceManager resourceManager, @NonNull SubPlan subPlan) { Map<TaskGroupLocation, CompletableFuture<SlotProfile>> futures = new HashMap<>(); Map<TaskGroupLocation, SlotProfile> slotProfiles = new HashMap<>(); // TODO If there is no enough resources for tasks, we need add some wait profile subPlan.getCoordinatorVertexList() .forEach( coordinator -> futures.put( coordinator.getTaskGroupLocation(), applyResourceForTask( resourceManager, coordinator, subPlan.getTags()))); subPlan.getPhysicalVertexList() .forEach( task -> futures.put( task.getTaskGroupLocation(), applyResourceForTask( resourceManager, task, subPlan.getTags()))); futures.forEach( (key, value) -> { try { slotProfiles.put(key, value == null ? null : value.join()); } catch (CompletionException e) { // do nothing } }); // set it first, avoid can't get it when get resource not enough exception and need release // applied resource subPlan.getJobMaster().setOwnedSlotProfiles(subPlan.getPipelineLocation(), slotProfiles); if (futures.size() != slotProfiles.size()) { throw new NoEnoughResourceException(); } } public static CompletableFuture<SlotProfile> applyResourceForTask( ResourceManager resourceManager, PhysicalVertex task, Map<String, String> tags) { // TODO custom resource size return resourceManager.applyResource( task.getTaskGroupLocation().getJobId(), new ResourceProfile(), tags); } public CompletableFuture<List<SlotProfile>> applyResources( long jobId, List<ResourceProfile> resourceProfile, Map<String, String> tagFilter) throws NoEnoughResourceException { waitingWorkerRegister(); ConcurrentMap<Address, WorkerProfile> matchedWorker = filterWorkerByTag(tagFilter); if (matchedWorker.isEmpty()) { log.error("No matched worker with tag filter {}.", tagFilter); throw new NoEnoughResourceException(); } return new ResourceRequestHandler(jobId, resourceProfile, matchedWorker, this) .request(tagFilter); } 사용 가능한 모든 노드를 얻으면 노드를 섞고 필요한 리소스보다 큰 리소스를 가진 노드를 무작위로 선택합니다. 그런 다음 노드에 연락하고 을 전송합니다. RequestSlotOperation public Optional<WorkerProfile> preCheckWorkerResource(ResourceProfile r) { // Shuffle the order to ensure random selection of workers List<WorkerProfile> workerProfiles = Arrays.asList(registerWorker.values().toArray(new WorkerProfile[0])); Collections.shuffle(workerProfiles); // Check if there are still unassigned slots Optional<WorkerProfile> workerProfile = workerProfiles.stream() .filter( worker -> Arrays.stream(worker.getUnassignedSlots()) .anyMatch( slot -> slot.getResourceProfile() .enoughThan(r))) .findAny(); if (!workerProfile.isPresent()) { // Check if there are still unassigned resources workerProfile = workerProfiles.stream() .filter(WorkerProfile::isDynamicSlot) .filter(worker -> worker.getUnassignedResource().enoughThan(r)) .findAny(); } return workerProfile; } private CompletableFuture<SlotAndWorkerProfile> singleResourceRequestToMember( int i, ResourceProfile r, WorkerProfile workerProfile) { CompletableFuture<SlotAndWorkerProfile> future = resourceManager.sendToMember( new RequestSlotOperation(jobId, r), workerProfile.getAddress()); return future.whenComplete( withTryCatch( LOGGER, (slotAndWorkerProfile, error) -> { if (error != null) { throw new RuntimeException(error); } else { resourceManager.heartbeat(slotAndWorkerProfile.getWorkerProfile()); addSlotToCacheMap(i, slotAndWorkerProfile.getSlotProfile()); } })); } 노드의 요청을 받으면 자체 정보를 업데이트하고 마스터 노드로 반환합니다. 리소스 요청이 예상 결과를 충족하지 못하면 이 발생하여 작업 실패를 나타냅니다. 리소스 할당이 성공하면 작업 배포가 로 시작되어 작업을 실행을 위해 노드로 보냅니다. SlotService requestSlot NoEnoughResourceException task.makeTaskGroupDeploy() worker TaskDeployState deployState = deploy(jobMaster.getOwnedSlotProfiles(taskGroupLocation)); public TaskDeployState deploy(@NonNull SlotProfile slotProfile) { try { if (slotProfile.getWorker().equals(nodeEngine.getThisAddress())) { return deployOnLocal(slotProfile); } else { return deployOnRemote(slotProfile); } } catch (Throwable th) { return TaskDeployState.failed(th); } } private TaskDeployState deployOnRemote(@Non Null SlotProfile slotProfile) { return deployInternal( taskGroupImmutableInformation -> { try { return (TaskDeployState) NodeEngineUtil.sendOperationToMemberNode( nodeEngine, new DeployTaskOperation( slotProfile, nodeEngine .getSerializationService() .toData( taskGroupImmutableInformation)), slotProfile.getWorker()) .get(); } catch (Exception e) { if (getExecutionState().isEndState()) { log.warn(ExceptionUtils.getMessage(e)); log.warn( String.format( "%s deploy error, but the state is already in end state %s, skip this error", getTaskFullName(), currExecutionState)); return TaskDeployState.success(); } else { return TaskDeployState.failed(e); } } }); } 작업 배치 작업을 배포할 때 작업 정보는 리소스 할당 중에 얻은 노드로 전송됩니다. public TaskDeployState deployTask(@NonNull Data taskImmutableInformation) { TaskGroupImmutableInformation taskImmutableInfo = nodeEngine.getSerializationService().toObject(taskImmutableInformation); return deployTask(taskImmutableInfo); } public TaskDeployState deployTask(@NonNull TaskGroupImmutableInformation taskImmutableInfo) { logger.info( String.format( "received deploying task executionId [%s]", taskImmutableInfo.getExecutionId())); TaskGroup taskGroup = null; try { Set<ConnectorJarIdentifier> connectorJarIdentifiers = taskImmutableInfo.getConnectorJarIdentifiers(); Set<URL> jars = new HashSet<>(); ClassLoader classLoader; if (!CollectionUtils.isEmpty(connectorJarIdentifiers)) { // Prioritize obtaining the jar package file required for the current task execution // from the local, if it does not exist locally, it will be downloaded from the // master node. jars = serverConnectorPackageClient.getConnectorJarFromLocal( connectorJarIdentifiers); } else if (!CollectionUtils.isEmpty(taskImmutableInfo.getJars())) { jars = taskImmutableInfo.getJars(); } classLoader = classLoaderService.getClassLoader( taskImmutableInfo.getJobId(), Lists.newArrayList(jars)); if (jars.isEmpty()) { taskGroup = nodeEngine.getSerializationService().toObject(taskImmutableInfo.getGroup()); } else { taskGroup = CustomClassLoadedObject.deserializeWithCustomClassLoader( nodeEngine.getSerializationService(), classLoader, taskImmutableInfo.getGroup()); } logger.info( String.format( "deploying task %s, executionId [%s]", taskGroup.getTaskGroupLocation(), taskImmutableInfo.getExecutionId())); synchronized (this) { if (executionContexts.containsKey(taskGroup.getTaskGroupLocation())) { throw new RuntimeException( String.format( "TaskGroupLocation: %s already exists", taskGroup.getTaskGroupLocation())); } deployLocalTask(taskGroup, classLoader, jars); return TaskDeployState.success(); } } catch (Throwable t) { logger.severe( String.format( "TaskGroupID : %s deploy error with Exception: %s", taskGroup != null && taskGroup.getTaskGroupLocation() != null ? taskGroup.getTaskGroupLocation().toString() : "taskGroupLocation is null", ExceptionUtils.getMessage(t))); return TaskDeployState.failed(t); } } 워커 노드가 작업을 수신하면 의 메서드를 호출하여 시작 시 생성된 스레드 풀에 작업을 제출합니다. TaskExecutionService deployTask 작업이 스레드 풀에 제출되면: private final class BlockingWorker implements Runnable { private final TaskTracker tracker; private final CountDownLatch startedLatch; private BlockingWorker(TaskTracker tracker, CountDownLatch startedLatch) { this.tracker = tracker; this.startedLatch = startedLatch; } @Override public void run() { TaskExecutionService.TaskGroupExecutionTracker taskGroupExecutionTracker = tracker.taskGroupExecutionTracker; ClassLoader classLoader = executionContexts .get(taskGroupExecutionTracker.taskGroup.getTaskGroupLocation()) .getClassLoader(); ClassLoader oldClassLoader = Thread.currentThread().getContextClassLoader(); Thread.currentThread().setContextClassLoader(classLoader); final Task t = tracker.task; ProgressState result = null; try { startedLatch.countDown(); t.init(); do { result = t.call(); } while (!result.isDone() && isRunning && !taskGroupExecutionTracker.executionCompletedExceptionally()); ... } } 메서드가 호출되어 데이터 동기화 작업이 실제로 실행됩니다. Task.call 클래스로더 SeaTunnel에서는 기본 ClassLoader가 수정되어 다른 구성 요소 클래스와의 충돌을 피하기 위해 하위 클래스를 우선시합니다. @Override public synchronized ClassLoader getClassLoader(long jobId, Collection<URL> jars) { log.debug("Get classloader for job {} with jars {}", jobId, jars); if (cacheMode) { // with cache mode, all jobs share the same classloader if the jars are the same jobId = 1L; } if (!classLoaderCache.containsKey(jobId)) { classLoaderCache.put(jobId, new ConcurrentHashMap<>()); classLoaderReferenceCount.put(jobId, new ConcurrentHashMap<>()); } Map<String, ClassLoader> classLoaderMap = classLoaderCache.get(jobId); String key = covertJarsToKey(jars); if (classLoaderMap.containsKey(key)) { classLoaderReferenceCount.get(jobId).get(key).incrementAndGet(); return classLoaderMap.get(key); } else { ClassLoader classLoader = new SeaTunnelChildFirstClassLoader(jars); log.info("Create classloader for job {} with jars {}", jobId, jars); classLoaderMap.put(key, classLoader); classLoaderReferenceCount.get(jobId).put(key, new AtomicInteger(1)); return classLoader; } } REST API 작업 제출 SeaTunnel은 REST API를 통한 작업 제출도 지원합니다. 이 기능을 활성화하려면 다음 구성을 파일에 추가하세요. hazelcast.yaml network: rest-api: enabled: true endpoint-groups: CLUSTER_WRITE: enabled: true DATA: enabled: true 이 구성을 추가하면 Hazelcast 노드가 HTTP 요청을 수신할 수 있습니다. REST API를 사용하여 작업을 제출하는 경우, 클라이언트는 HTTP 요청을 보내는 노드가 되고, 서버는 SeaTunnel 클러스터가 됩니다. 서버가 요청을 받으면 요청 URI에 따라 적절한 메서드를 호출합니다. public void handle(HttpPostCommand httpPostCommand) { String uri = httpPostCommand.getURI(); try { if (uri.startsWith(SUBMIT_JOB_URL)) { handleSubmitJob(httpPostCommand, uri); } else if (uri.startsWith(STOP_JOB_URL)) { handleStopJob(httpPostCommand, uri); } else if (uri.startsWith(ENCRYPT_CONFIG)) { handleEncrypt(httpPostCommand); } else { original.handle(httpPostCommand); } } catch (IllegalArgumentException e) { prepareResponse(SC_400, httpPostCommand, exceptionResponse(e)); } catch (Throwable e) { logger.warning("An error occurred while handling request " + httpPostCommand, e); prepareResponse(SC_500, httpPostCommand, exceptionResponse(e)); } this.textCommandService.sendResponse(httpPostCommand); } 작업 제출 요청을 처리하는 방법은 경로에 따라 결정됩니다. private void handleSubmitJob(HttpPostCommand httpPostCommand, String uri) throws IllegalArgumentException { Map<String, String> requestParams = new HashMap<>(); RestUtil.buildRequestParams(requestParams, uri); Config config = RestUtil.buildConfig(requestHandle(httpPostCommand), false); ReadonlyConfig envOptions = ReadonlyConfig.fromConfig(config.getConfig("env")); String jobName = envOptions.get(EnvCommonOptions.JOB_NAME); JobConfig jobConfig = new JobConfig(); jobConfig.setName( StringUtils.isEmpty(requestParams.get(RestConstant.JOB_NAME)) ? jobName : requestParams.get(RestConstant.JOB_NAME)); boolean startWithSavePoint = Boolean.parseBoolean(requestParams.get(RestConstant.IS_START_WITH_SAVE_POINT)); String jobIdStr = requestParams.get(RestConstant.JOB_ID); Long finalJobId = StringUtils.isNotBlank(jobIdStr) ? Long.parseLong(jobIdStr) : null; SeaTunnelServer seaTunnelServer = getSeaTunnelServer(); RestJobExecutionEnvironment restJobExecutionEnvironment = new RestJobExecutionEnvironment( seaTunnelServer, jobConfig, config, textCommandService.getNode(), startWithSavePoint, finalJobId); JobImmutableInformation jobImmutableInformation = restJobExecutionEnvironment.build(); long jobId = jobImmutableInformation.getJobId(); if (!seaTunnelServer.isMasterNode()) { NodeEngineUtil.sendOperationToMasterNode( getNode().nodeEngine, new SubmitJobOperation( jobId, getNode().nodeEngine.toData(jobImmutableInformation), jobImmutableInformation.isStartWithSavePoint())) .join(); } else { submitJob(seaTunnelServer, jobImmutableInformation, jobConfig); } this.prepareResponse( httpPostCommand, new JsonObject() .add(RestConstant.JOB_ID, String.valueOf(jobId)) .add(RestConstant.JOB_NAME, jobConfig.getName())); } 여기의 논리는 클라이언트 측과 유사합니다. 로컬 모드가 없으므로 로컬 서비스를 만들 필요가 없습니다. 클라이언트 측에서 클래스는 논리적 계획 구문 분석에 사용되고 마찬가지로 클래스는 동일한 작업을 수행합니다. ClientJobExecutionEnvironment RestJobExecutionEnvironment 작업을 제출할 때 현재 노드가 마스터 노드가 아니면 마스터 노드로 정보를 보냅니다. 마스터 노드는 명령줄 클라이언트의 명령을 처리하는 방식과 유사하게 작업 제출을 처리합니다. 현재 노드가 마스터 노드인 경우 메서드를 직접 호출하고, 이 메서드는 후속 처리를 위해 메서드를 호출합니다. submitJob coordinatorService.submitJob private void submitJob( SeaTunnelServer seaTunnelServer, JobImmutableInformation jobImmutableInformation, JobConfig jobConfig) { CoordinatorService coordinatorService = seaTunnelServer.getCoordinatorService(); Data data = textCommandService .getNode() .nodeEngine .getSerializationService() .toData(jobImmutableInformation); PassiveCompletableFuture<Void> voidPassiveCompletableFuture = coordinatorService.submitJob( Long.parseLong(jobConfig.getJobContext().getJobId()), data, jobImmutableInformation.isStartWithSavePoint()); voidPassiveCompletableFuture.join(); } 두 제출 방법 모두 제출 측에서 논리적 계획을 구문 분석한 다음 정보를 마스터 노드로 전송하는 것을 포함합니다. 그런 다음 마스터 노드는 물리적 계획 구문 분석, 할당 및 기타 작업을 수행합니다.