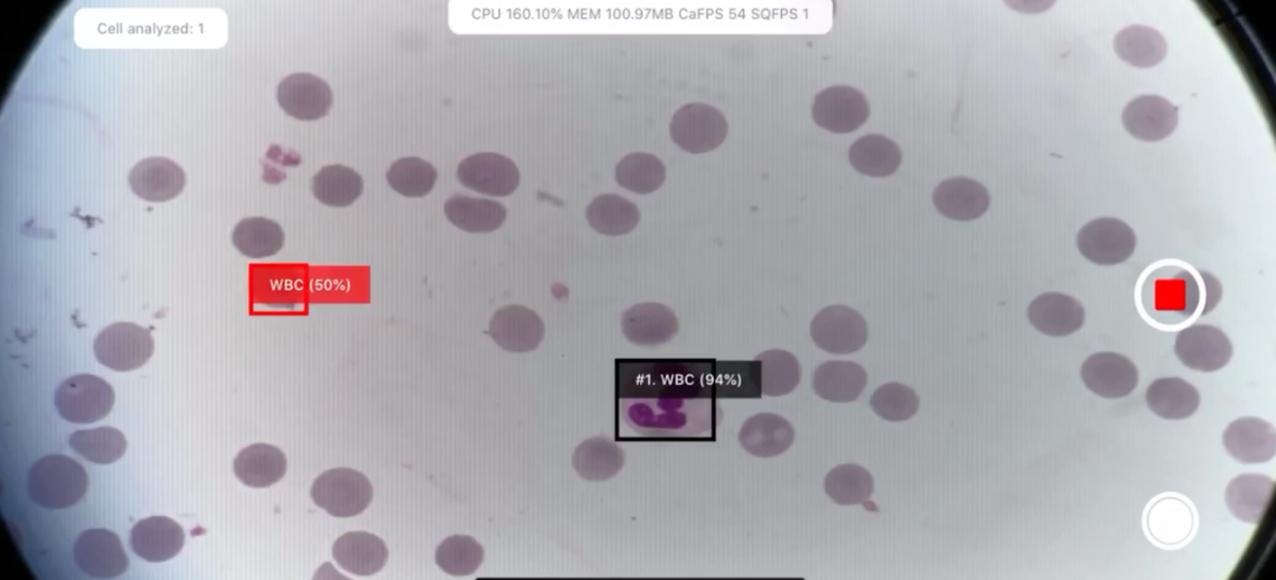
ລະຫັດ QR ໃນບົດຄວາມນີ້, ຂໍຂອບໃຈວ່າຂ້າພະເຈົ້າໄດ້ຮ່ວມມືກັບທ່ານກ່ຽວກັບປະສົບການຂອງຂ້າພະເຈົ້າໃນການພັດທະນາ app iOS ສໍາລັບ microscope robotic ມີການຢັ້ງຢືນແຜ່ນໃບຢັ້ງຢືນແຜ່ນໃບຢັ້ງຢືນແຜ່ນໃບຢັ້ງຢືນແຜ່ນໃບຢັ້ງຢືນແຜ່ນໃບຢັ້ງຢືນແຜ່ນໃບຢັ້ງຢືນແຜ່ນໃບຢັ້ງຢືນແຜ່ນໃບຢັ້ງຢືນແຜ່ນໃບຢັ້ງຢືນແຜ່ນໃບຢັ້ງຢືນແຜ່ນໃບຢັ້ງຢືນແຜ່ນໃບຢັ້ງຢືນແຜ່ນໃບຢັ້ງຢືນແຜ່ນໃບຢັ້ງຢືນແຜ່ນໃບຢັ້ງຢືນແຜ່ນໃບຢັ້ງຢືນ. ນີ້ແມ່ນບໍ່ວ່າຈະເປັນ app ອັດຕະໂນມັດຫຼື app ສໍາລັບການນໍາໃຊ້ແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ A Few Words About the Product ຖ້າຫາກວ່າທ່ານກໍາລັງຊອກຫາຂໍ້ມູນເພີ່ມເຕີມກ່ຽວກັບການຢັ້ງຢືນຢັ້ງຢືນຢັ້ງຢືນຢັ້ງຢືນຢັ້ງຢືນຢັ້ງຢືນຢັ້ງຢືນຢັ້ງຢືນຢັ້ງຢືນຢັ້ງຢືນຢັ້ງຢືນຢືນຢັ້ງຢືນຢັ້ງຢືນຢັ້ງຢືນຢືນຢັ້ງຢືນຢັ້ງຢືນຢືນຢັ້ງຢືນຢືນຢັ້ງຢືນຢືນຢັ້ງຢືນຢັ້ງຢືນຢັ້ງຢືນຢັ້ງຢືນຢັ້ງຢືນຢັ້ງຢືນຢັ້ງຢືນຢັ້ງຢືນຢັ້ງຢືນຢືນຢັ້ງຢືນຢືນຢັ້ງຢືນຢືນຢັ້ງຢືນຢືນຢັ້ງຢືນຢືນຢັ້ງຢືນຢືນຢັ້ງຢືນຢືນຢັ້ງຢືນຢືນຢັ້ງຢືນຢືນຢັ້ງຢືນຢືນຢືນຢັ້ງຢືນຢືນຢ ທີມງານໃນ . ລະຫັດ QR ຂໍຂອບໃຈ ຊຸດເຊື່ອມຕໍ່ກັບ microscope ອັດຕະໂນມັດ, ການປ່ຽນແປງມັນເປັນ scanner ອັດຕະໂນມັດ. ອຸປະກອນການຂອງຕົນປະກອບມີ: iPhone – ການຄວບຄຸມລະບົບ, ການທົດສອບແວ Adapter Lens – ການເຊື່ອມຕໍ່ໂທລະສັບມືຖືກັບ eyepiece ຂອງ microscope ປະສິດທິພາບ robotic - ເຮັດໃຫ້ສາມາດການຂົນສົ່ງ slide, ການຄວບຄຸມ fokus, ແລະການປ່ຽນແປງລະຫວ່າງຕົວຢ່າງ ໃນຖານະເປັນ Software, ລະບົບປະກອບດ້ວຍ: ຄໍາຮ້ອງສະຫມັກໂທລະສັບມືຖື iPhone ການຄວບຄຸມໃນສະຖານທີ່ ເວັບໄຊທ໌ / Cloud ຄໍາຮ້ອງສະຫມັກໂທລະສັບມືຖືເຮັດວຽກທີ່ຜ່ານມາ: ການປິ່ນປົວໄຟລ໌ຮູບພາບຈາກກ້ອງຖ່າຍຮູບ, ຄົ້ນຄວ້າ, ປະເພດແລະກວດສອບແວ ສະຫນັບສະຫນູນຜູ້ຊ່ຽວຊານສໍາລັບການຄົ້ນຄວ້າ ການຄວບຄຸມການເດີນທາງຂອງລະດັບ robotic, ເຮັດໃຫ້ການ scanning smare ໂດຍລວມກັບ algorithm predefined ແລະຍັງຮັບຜິດຊອບສໍາລັບການຄຸ້ມຄອງແລະການເລີ່ມຕົ້ນການທົດສອບ, ການປັບປຸງຄຸນນະພາບຂອງອຸປະກອນ, ການເບິ່ງຂໍ້ມູນການທົດສອບຢ່າງງ່າຍດາຍ, ແລະກິດຈະກໍາອື່ນໆທີ່ກ່ຽວຂ້ອງ ເວັບໄຊທ໌ໄດ້ຖືກອອກແບບມາສໍາລັບການເບິ່ງຜົນກະທົບ, ການຢັ້ງຢືນການປິ່ນປົວຂອງການທົດສອບ, ແລະການສົ່ງອອກຂໍ້ມູນ. ຂ້າງລຸ່ມນີ້ແມ່ນ ການສະແດງໃຫ້ເຫັນວ່າພວກເຂົາເຈົ້າໄດ້ເຮັດວຽກຮ່ວມກັນ: ວິດີໂອ A Bit of Context About Hematological Diagnostics ການທົດສອບຕົ້ນຕໍທີ່ພວກເຮົາມີການເຮັດວຽກແມ່ນ microscopy ລະບົບໄຮໂດຼລິກ. ມັນເປັນສ່ວນຫນຶ່ງຂອງການຄົ້ນຄວ້າຄົ້ນຄວ້າໄຮໂດຼລິກທັງຫມົດ (CBC), ເປັນຫນຶ່ງໃນການທົດສອບດ້ານວິຊາການທີ່ປົກກະຕິແລະພື້ນຖານທີ່ສຸດ. ຜູ້ໃຫຍ່ໄດ້ຜ່ານມັນແລະໄດ້ຊອກຫາຮູບເງົາທີ່ແຕກຕ່າງກັນໃນຜົນໄດ້ຮັບຂອງເຂົາເຈົ້າ ( ປະເພດ : ລະຫັດ QR ໃນເວລາທີ່ປະຕິບັດການ CBC, sample ຂອງຮ່າງກາຍໄດ້ຮັບການປິ່ນປົວໂດຍຜ່ານ analyzers hematology. ຖ້າຫາກວ່າອຸປະກອນສະແດງໃຫ້ເຫັນການຕັດສິນໃຈຈາກມາດຕະຖານ, sample ຈະໄດ້ຮັບການກວດສອບ microscopic. ການປິ່ນປົວນີ້ແມ່ນເຊັ່ນດຽວກັນ: ວິສະວະກອນການທົດລອງໄດ້ຕິດຕາມລັກສະນະຂອງລັກສະນະທີ່ມີຄຸນນະພາບສູງແລະຄຸນນະພາບສູງ ການນໍາໃຊ້ວິທີ Romanowsky (ຫຼືວິທີທີ່ແຕກຕ່າງກັນ<)1 ແລະກວດສອບການກັ່ນຕອງທີ່ໄດ້ຮັບການ prepared under the microscope visually. ມັນແມ່ນພຽງແຕ່ໃນປັດຈຸບັນທີ່ທ່ານສາມາດ: ການຄົ້ນຄວ້າຂອງ morphologies cell abnormal (ລວມທັງ neutrophils immature, lymphocytes atypical, blast cells) ການກວດສອບຄວາມຍາວ, ຂະຫນາດ, granularity, ການເຊື່ອມຕໍ່, ແລະ parameters ອື່ນໆ, ຫຼັງຈາກນັ້ນ, ທ່ານສາມາດກວດສອບ PCR2 ຫຼື ELISA3. But manual analysis is painful: ທີ່ດີທີ່ສຸດແມ່ນ subjective, ການຄົ້ນຄວ້າຂອງຜູ້ຊ່ຽວຊານ ວິທະຍາໄລແລະວິທະຍາສາດວິທະຍາສາດ ແລະມັນບໍ່ມີ scale ທີ່ດີ. ລະບົບ microscopy ອັດຕະໂນມັດແມ່ນດີ, ແຕ່ພວກເຮົາມີຄ່າໃຊ້ຈ່າຍທີ່ດີ (ເລີ່ມຕົ້ນຈາກ $ 60,000 ແລະສູງກວ່າ), ເປັນຫຍັງຫຼາຍກ່ວາ 90% ຂອງຫ້ອງທົດລອງຍັງເຊື່ອມຕໍ່ກັບວິທີ manual! ພວກເຮົາມີຄວາມຈຸດປະສົງຂອງການສ້າງຊຸດອັດຕະໂນມັດ microscope ທີ່ມີຄ່າໃຊ້ຈ່າຍ (ໃນໄລຍະຫຼາຍກ່ວາຫຼາຍກ່ວາ 10,000 rubles) ທີ່ສາມາດຖືກນໍາໃຊ້ຢ່າງກວ້າງຂວາງໃນຫ້ອງທົດລອງ. [1] - ໂມງສີຂາວໃນ slide ແມ່ນໄດ້ຮັບການປິ່ນປົວດ້ວຍສີພິເສດທີ່ພັດທະນາໂດຍ Dmitry Leonidovich Romanowsky (1861-1921). ສີຂາວນີ້ເຮັດໃຫ້ສ່ວນປະກອບຕ່າງໆຂອງແຜ່ນສີຂາວເບິ່ງຫຼາຍກວ່າພາຍໃຕ້ microscope, ໃນຂະນະທີ່ພວກເຂົາເຈົ້າໄດ້ຮັບສີຂາວທີ່ແຕກຕ່າງກັນ [2] - PCR (Polymerase Chain Reaction) ເຮັດໃຫ້ມັນສາມາດຊອກຫາເຖິງແມ່ນວ່າຂະຫນາດນ້ອຍຂອງອຸປະກອນ genetic, ເຊັ່ນ virus ຫຼື bacteria, ເຊິ່ງເປັນສິ່ງທີ່ສໍາຄັນສໍາລັບການຢັ້ງຢືນການປິ່ນປົວ. ພວກເຮົາມີຄວາມຮູ້ສຶກທີ່ດີຈາກໄລຍະ COVID [3] - ELISA (Enzyme-Linked Immunosorbent Assay) ຖືກນໍາໃຊ້ໃນເວລາທີ່ມັນເປັນສິ່ງທີ່ສໍາຄັນເພື່ອທົດສອບຄວາມເປັນສ່ວນຕົວຂອງ protéins ທີ່ພິເສດ What the iPhone Is Capable Of ໃນຂະນະທີ່ພວກເຮົາມີຄວາມຮູ້ກ່ຽວກັບ "AI ໃນໂທລະສັບມືຖື", ຜູ້ໃຫຍ່ໄດ້ມັກວ່າສິ່ງທີ່ຄ້າຍຄືກັນກັບການກັ່ນຕອງໂທລະສັບມືຖື, autocomplete ລະຫັດ, ຫຼື chatbots. ແຕ່ iPhone modern ແມ່ນ mini-computers ມີ modules neural dedicated ທີ່ສາມາດເຮັດວຽກທີ່ສໍາຄັນ - ໃນກໍລະນີຂອງພວກເຮົາມີ, ການທົດສອບແຜ່ນໃບອະນຸຍາດໃນເວລາທີ່ແທ້ຈິງ. ຂໍຂອບໃຈວ່າພວກເຮົາມີສາມອຸປະກອນຕົ້ນຕໍທີ່ເຮັດໃຫ້ມັນສາມາດເຮັດໄດ້: Graphics Processing Unit (GPU) ການນໍາໃຊ້ສໍາລັບການປະຕິບັດຮູບພາບ: preprocessing, ການກັ່ນຕອງ, ການປິ່ນປົວ. ຜະລິດຕະພັນທີ່ກ່ຽວຂ້ອງກັບ: ການຄາດຄະເນ blur, ການປິ່ນປົວສີ, ການຫຼຸດຜ່ອນອຸປະກອນ, ແລະການເຮັດວຽກພິເສດອື່ນໆທີ່ກ່ຽວຂ້ອງກັບຮູບພາບແລະການທົດສອບຮູບພາບ. Neural Engine (NPU / Neural Engine) Apple ໄດ້ເຂົ້າລະຫັດ Neural Engine ໃນອຸປະກອນຂອງຕົນເລີ່ມຕົ້ນດ້ວຍ chip A11 (iPhone 8 / X) ແລະຈາກ A12 (iPhone XR ແລະອື່ນໆ), ມັນໄດ້ຖືກນໍາໃຊ້ສໍາລັບການເຮັດວຽກຫຼາຍກ່ວາ 5 trillion ໃນຊົ່ວໂມງກ່ຽວກັບ NPU (TOPS). ໃນເວລາທີ່ຂຽນ, chip ໃຫມ່ A17 Pro ແລະ A18 / A18 Pro ມີຄວາມສາມາດຂອງ 35 TOPS. ນີ້ຖືກນໍາໃຊ້ສໍາລັບການເຂົ້າລະຫັດຂອງມາດຕະຖານສໍາລັບການຊອກຫາແລະປະເພດ, ການຄາດຄະເນຂອງຕົວຢ່າງ, ແລະກິດຈະກໍາທີ່ແຕກຕ່າງກັນ, ການຟຣີ CPU / GPU. ຊຸດການປິ່ນປົວສູນກາງ (CPU) - Responsible for overall logic, control, configuration processing, serialization / deserialization, working with APIs and the file system - ໃນຖານະເປັນສິ່ງທຸກຢ່າງທີ່ບໍ່ແມ່ນພາຍໃຕ້ສອງ components ທີ່ຜ່ານມາ. ພວກເຮົາຈະ discuss this using the iPhone XR (A12 Bionic, 2018) as a kind of baseline, ເຊັ່ນດຽວກັນກັບວ່າມັນເປັນອຸປະກອນທີ່ຜ່ານມາ. ການເຮັດວຽກຂອງ 50fps ວັດສະດຸ stream ຈາກກ້ອງຖ່າຍຮູບ microscope, ການນໍາໃຊ້ CoreML Inference (~ 15ms per frame) ການເກັບຮັກສາຂໍ້ມູນໃນ disk ແລະ synchronize ກັບ cloud, ການປົກປ້ອງອຸນຫະພູມພາຍໃນອຸນຫະພູມທີ່ຖືກຕ້ອງ (ຫຼັງຈາກນັ້ນ, ຖ້າຫາກວ່າການຄາດຄະເນດິນແລະການຄາດຄະເນດິນດີຕ້ອນຮັບໄດ້ຮັບການຄາດຄະເນດິນດີຕ້ອນຮັບ). ໃນຖານະເປັນຜູ້ຊ່ຽວຊານຂອງການຝຶກອົບຮົມອຸປະກອນການຝຶກອົບຮົມອຸປະກອນການຝຶກອົບຮົມອຸປະກອນການຝຶກອົບຮົມອຸປະກອນການຝຶກອົບຮົມອຸປະກອນການຝຶກອົບຮົມອຸປະກອນການຝຶກອົບຮົມອຸປະກອນການຝຶກອົບຮົມອຸປະກອນການຝຶກອົບຮົມອຸປະກອນການຝຶກອົບຮົມອຸປະກອນການຝຶກອົບຮົມ ຮູບພາບ ສໍາ ລັບ Screenshot ທີ່ຢູ່ ສະ ຫນັບ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ໂດຍທົ່ວໄປ, ໃນ iOS, ມັນສາມາດຄວບຄຸມສະພາບອາກາດຂອງລະບົບ via ໃນອຸນຫະພູມຜະລິດຕະພັນຂອງພວກເຮົາ, ພວກເຮົາບໍ່ໄດ້ເຂົ້າເຖິງລະດັບ Critical, ແຕ່ລະດັບ Serious ແມ່ນຖືກນໍາໃຊ້ຢ່າງກວ້າງຂວາງໃນອຸນຫະພູມທີ່ສູງທີ່ສຸດ. ສໍາລັບການກວດສອບປະສິດທິພາບ, ພວກເຮົາໄດ້ນໍາໃຊ້ Xcode Profiler, ເຊິ່ງໃຫ້ທ່ານສາມາດກວດສອບ CPU, GPU, ແລະອຸນຫະພູມອຸປະກອນ, ເຊັ່ນດຽວກັນກັບອຸນຫະພູມ: ປະເພດ ProcessInfo.processInfo.thermalState ແລະ here is a table of thermalState values with explanations from the documentation: Thermal State Recommendations System Actions Nominal No corrective action required. — Fair Temperature is slightly elevated. Applications may proactively begin power-saving measures. Photo analysis is paused. Serious System performance is reduced. Applications should decrease usage of the CPU, GPU, and I/O operations. ARKit and FaceTime lower the frame rate (FPS). iCloud backup restoration is paused. Critical Applications should reduce CPU, GPU, and I/O usage and stop using peripheral devices (e.g., the camera). ARKit and FaceTime significantly lower the frame rate (FPS). ຊື່ ການປິ່ນປົວທີ່ບໍ່ຈໍາເປັນ — ປະເພດ ອຸນຫະພູມແມ່ນຂະຫນາດນ້ອຍສູງ. applications can proactively start power-saving measures. ການທົດສອບຮູບພາບແມ່ນ paused. ລະຫັດ QR ການເຮັດວຽກຂອງລະບົບແມ່ນ reduced. Applications should decrease usage of the CPU, GPU, and I/O operations. ARKit ແລະ FaceTime ດາວໂຫລດລະດັບ frame rate (FPS) ໃນປັດຈຸບັນ ຄວາມຄິດເຫັນ ຄໍາຮ້ອງສະຫມັກຈໍາເປັນຕ້ອງຫຼຸດຜ່ອນການນໍາໃຊ້ CPU, GPU, ແລະ I/O ແລະຫຼຸດຜ່ອນການນໍາໃຊ້ອຸປະກອນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນ ARKit ແລະ FaceTime ປະສິດທິພາບຢ່າງກວ້າງຂວາງຫຼຸດຜ່ອນຄວາມໄວ frame rate (FPS). ການທົດສອບອຸນຫະພູມແລະພະລັງງານທັງຫມົດຄຸນນະສົມບັດສໍາລັບບົດລາຍລະອຽດທີ່ແຕກຕ່າງກັນ - ເຊັ່ນດຽວກັນກັບຂ້າພະເຈົ້າໄດ້ຂຽນໃນຕອນເລີ່ມຕົ້ນ, ຂໍຂອບໃຈວ່າຂ້າພະເຈົ້າບໍ່ຕ້ອງການເຂົ້າໃຈຫຼາຍກ່ວານີ້. ໃນຖານະເປັນເຈົ້າຂອງພວກເຮົາ, ພວກເຮົາມີຄວາມເປັນສ່ວນບຸກຄົນ, ທີ່ມີຄຸນນະພາບສູງແລະຄຸນນະພາບສູງ. ສະພາບອາກາດອະນຸຍາດໃຫ້ 80–90 ° C ໃນລະດັບ chip ແລະ ~ 40 ° C ໃນພື້ນທີ່. ສະຫນັບສະຫນູນທົ່ວໄປ Serious iPhone ຈະເຮັດວຽກກັບທຸກຄົນ ອຸປະກອນ. ສໍາລັບອຸປະກອນອື່ນໆ, ມີ flux ອັດຕະໂນມັດ, ໃນເວລາທີ່ອຸປະກອນຈໍາເປັນຕ້ອງມີ (Made for iPhone) ການຢັ້ງຢືນ, ການເຮັດວຽກໂດຍຜ່ານ iAP2 (Apple Accessory Protocol), ແລະອື່ນໆ ໃນຂະນະທີ່ - ມັນບໍ່ແມ່ນກໍລະນີຂອງພວກເຮົາ. ລະຫັດ QR ພາສາລາວ ມັນເປັນປະໂຫຍດໃນປັດຈຸບັນເພື່ອຊອກຫາຄູ່ຮ່ວມງານພື້ນຖານແລະໂຄງສ້າງຂອງໂຄງສ້າງ: ປະຫວັດສາດ - ການອຸປະກອນທີ່ເຊື່ອມຕໍ່ກັບ. ປະຫວັດສາດ, ການແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ Central — ການອຸປະກອນທີ່ເຊື່ອມຕໍ່ກັບ peripheral. ມັນເລີ່ມຕົ້ນການເຊື່ອມຕໍ່, ສະຫນັບສະຫນູນການຄຸ້ມຄອງ, ແລະໄດ້ຮັບຂໍ້ມູນ. GATT (Generic Attribute Profile) — ລະບົບທີ່ຜ່ານມາທີ່ອຸປະກອນ BLE ການປ່ຽນແປງຂໍ້ມູນ. GATT defines which “fields” are available, what can be read, written, or subscribed to for notifications. ການບໍລິການແລະຄຸນນະສົມບັດ – ຂໍ້ມູນໃນການເຊື່ອມຕໍ່ BLE ໄດ້ຖືກສ້າງຕັ້ງຂຶ້ນໃນບໍລິການ (ກຸ່ມສອດຄ່ອງກັບ) ແລະຄຸນນະສົມບັດ (ຄຸນນະສົມບັດທີ່ແຕກຕ່າງກັນ). ໂດຍສະເພາະ, tracker Fitness ສາມາດມີບໍລິການ Heart Rate, ເຊິ່ງປະກອບມີຄຸນນະສົມບັດຄຸນນະສົມບັດ Heart Rate Measurement (ຄຸນສົມບັດຄຸນສົມບັດຄຸນສົມບັດຄຸນສົມບັດ). ໃນກໍລະນີຂອງພວກເຮົາ, iPhone ໄດ້ຄວບຄຸມສະຖານທີ່ໂດຍຜ່ານ module BLE ທີ່ສ້າງຕັ້ງຂຶ້ນ, ເຊິ່ງເປັນ Peripheral ມີບໍລິການ GATT custom ແລະເຮັດວຽກທັງສອງ: ການຂົນສົ່ງການຄຸ້ມຄອງການຂົນສົ່ງກັບ controller ສໍາລັບ axes XY ແລະການຄວບຄຸມ focus along the Z axis ການເຂົ້າເຖິງຂໍ້ມູນຈາກຜູ້ຄວບຄຸມ (status, position) ກ່ຽວກັບຄວາມຮ້ອນ, ການເຊື່ອມຕໍ່ BLE ຈະບໍ່ມີຜົນປະໂຫຍດເພີ່ມເຕີມ. ໃນຖານະເປັນຂໍ້ມູນຈາກ Silicon Labs ໃນປັດຈຸບັນ , ສະຫນັບສະຫນູນການອະນຸຍາດຫຼືໄດ້ຮັບການສະຖານທີ່ໃນອຸນຫະພູມຂອງ 20 Hz (interval ຂອງ 50 ms): ການນໍາໃຊ້ໄຟຟ້າ BLE ການນໍາໃຊ້ພະລັງງານທີ່ເປັນປະໂຫຍດຂອງ iPhone XR ແມ່ນປະມານ 50-100 mW. ການເພີ່ມຂຶ້ນຂອງ 1 mW ແມ່ນປະມານບໍ່ຈໍາເປັນ, ໂດຍສະເພາະແມ່ນ compared ກັບການປິ່ນປົວເຄືອຂ່າຍ neuronal, ການນໍາໃຊ້ GPU, ແລະການສະແດງ. ລະບົບໄຮໂດຼລິກທີ່ໃຊ້ເວລາແມ່ນພຽງແຕ່ 2% ຂອງເວລາ, ທີ່ໃຊ້ເວລາຂອງຂ້າມ. ພວກເຮົາຈະຊອກຫາຂໍ້ມູນເພີ່ມເຕີມກ່ຽວກັບການເຮັດວຽກຂອງ app ກັບ BLE module ແລະການຄວບຄຸມໃນພາກສ່ວນ “ການເຮັດວຽກທີ່ມີ Motorized Stage.” ພວກເຮົາມີການນໍາໃຊ້ກ້ອງຖ່າຍຮູບຕົ້ນຕໍ (ສະພາບແວດລ້ອມຂະຫນາດໃຫຍ່) ຫຼັງຈາກນັ້ນ: ພວກເຮົາກວດກາວິດີໂອ H.264 ທີ່ມີ resolutions ຂອງ 1280×720 ແລະ bitrate ຂອງປະມານ 40 Mbps. ອັດຕະໂນມັດ Bitrate ອັດຕະໂນມັດ Bitrate ອັດຕະໂນມັດ Bitrate ອັດຕະໂນມັດ Bitrate ອັດຕະໂນມັດ Bitrate ອັດຕະໂນມັດ Bitrate ອັດຕະໂນມັດ Bitrate ອັດຕະໂນມັດ Bitrate ອັດຕະໂນມັດ Bitrate ອັດຕະໂນມັດ Bitrate ອັດຕະໂນມັດ Bitrate ອັດຕະໂນມັດ Bitrate ອັດຕະໂນມັດ Bitrate ອັດຕະໂນມັດ Bitrate ອັດຕະໂນມັດ Bitrate ອັດຕະໂນມັດ Bitrate ອັດຕະໂນມັດ Bitrate ອັດຕະໂນມັດ Bitrate ອັດຕະໂນມັດ Bitrate ອັດຕະໂນມັດ Bitrate ອັດຕະໂນມັດ Bitrate ອັດຕະໂນມັດ Bitrate ອັດຕະໂນມັດ Bitrate ອັດຕະໂນມັດ Bitrate ອັດຕະໂນມັດ Bitrate ອັດຕະໂນມັດ Bitrate ອັດຕະໂນມັດ Bitrate ອັດຕະໂນມັດ Bitrate ອັດ H.264 ເປັນມາດຕະຖານການເຂົ້າລະຫັດວິດີໂອລະຫວ່າງປະເທດ, ເຊັ່ນດຽວກັນເປັນ AVC – Advanced Video Coding ຫຼື MPEG-4 Part 10. ມັນ eliminates data redundant (ທັງສອງ inter-frame ແລະ intra-frame compression), reducing the bitrate and, consequently, the file size. ດັ່ງນັ້ນ, ສິ່ງທີ່ພວກເຮົາມີການປິ່ນປົວແມ່ນບໍ່ພຽງແຕ່ໂທລະສັບມືຖື UI Client, ແຕ່ອຸປະກອນ Edge ທີ່ມີຄຸນນະສົມບັດທັງຫມົດ - ມັນເປັນອຸປະກອນທີ່ປິ່ນປົວຂໍ້ມູນຢູ່ໃນສະຖານທີ່, ບໍ່ມີການເຊື່ອມຕໍ່ຢ່າງຕໍ່ເນື່ອງກັບການບໍລິການ. ຄໍາຮ້ອງສະຫມັກ Mobile ໃນປັດຈຸບັນທີ່ພວກເຮົາມີການກວດກາ phần cứng, ກະລຸນາເບິ່ງວິທີການທັງຫມົດນີ້ເຮັດວຽກໃນລະດັບອຸປະກອນ. ກະລຸນາເລີ່ມຕົ້ນໂດຍ defining ການເຮັດວຽກ: ກ່ຽວກັບການເຂົ້າເຖິງ, application receives a stream of frames from the camera — microscope’s field of view moving across the smear. At the , the application must: output detect leukocytes (and other cells depending on the analysis) display detected objects with bounding boxes (BBoxes) perform cell counting send data in the background to the backend (images of cells, the scan, individual frames) ຂ້າພະເຈົ້າສືບຕໍ່ໄດ້ຮັບການປະທັບໃຈ ສໍາ ລັບລູກຄ້າຂອງພວກເຮົາ - ຂ້າພະເຈົ້າຫວັງວ່າຈະໄດ້ເຮັດວຽກຮ່ວມກັບທ່ານອີກເທື່ອຫນຶ່ງ! . ນີ້ປະກອບມີການປິ່ນປົວ distortion, ການຕັດສິນຄ້າ, ການຄາດຄະເນດິນລະດັບ, ແລະການປິ່ນປົວແສງແລະສີ. 1) Preprocess the frames ວິທະຍາໄລແລະວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດແລະວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດວິທະຍາສາດ ພວກເຮົາມີຄວາມປອດໄພທີ່ຫມູ່ເພື່ອນຂອງພວກເຮົາມີຄວາມປອດໄພແລະຄວາມປອດໄພຂອງພວກເຮົາມີ. ແລະ ລະຫັດ QR 2) Detect, classify, count ຮູບພາບ ສໍາ ລັບ ໃນ ຮູບພາບ ສໍາ ລັບ ຂ້າງ ລຸ່ມ ນີ້, ຜູ້ ຫນຶ່ງ ຂອງ ຜູ້ ຫນຶ່ງ ຂອງ ການ ຄົ້ນ ຕໍ ທີ່ ຢູ່ ໃນ ປັດ ຈຸ ບັນ ທີ່ ນີ້, ຜູ້ ຫນຶ່ງ ຂອງ ຜູ້ ຫນຶ່ງ ຂອງ ຜູ້ ຫນຶ່ງ ຂອງ ຜູ້ ຫນຶ່ງ ຂອງ ຜູ້ ຫນຶ່ງ ຂອງ ຜູ້ ຫນຶ່ງ ຂອງ ຜູ້ ຫນຶ່ງ ຂອງ ຜູ້ ຫນຶ່ງ ຂອງ ຜູ້ ຫນຶ່ງ ຂອງ ຜູ້ ຫນຶ່ງ ຂອງ ຜູ້ ຫນຶ່ງ ຂອງ ຜູ້ ຫນຶ່ງ ຂອງ ຜູ້ ຫນຶ່ງ ຂອງ ທ່ານ: ໃນຖານະເປັນບໍລິສັດທີ່ໃຫ້ການຝຶກອົບຮົມຂອງພວກເຮົາສໍາລັບການຝຶກອົບຮົມໃຫ້ບຸກຄົນ, ບໍລິສັດແລະວິທະຍາໄລກ່ຽວກັບການຝຶກອົບຮົມຂອງພວກເຮົາ. 3) Control the microscope batches of cells to the cloud ( snapshots, metadata) without blocking the processing of the next analysis. 4) Upload ການທົດສອບນີ້ n ເວລາ, ໃນຂະນະທີ່ການທົດສອບໄດ້ຖືກນໍາໃຊ້ໃນ batches. 5) Repeat ແລະໄດ້ຮັບການທັງຫມົດນີ້ໂດຍບໍ່ມີໂທລະສັບ overheating. 6) ຄໍາຮ້ອງສະຫມັກໄດ້ພັດທະນາໃນ mode start-up ຄຸນນະສົມບັດ: ການຢັ້ງຢືນຊັດເຈນໄດ້ຖືກຈັດຂຶ້ນຢ່າງງ່າຍດາຍ, ຫຼັງຈາກນັ້ນຖືກປັບປຸງໃນ MVP (Minimum Viable Product) ທີ່ເຫມາະສົມສໍາລັບການທົດລອງໃນຫ້ອງທົດລອງແລະ pitching ກັບຜູ້ລົງທຶນ. ໃນຂະນະທີ່ຫຼັງຈາກນັ້ນ, ການອອກແບບຂອງ app ໄດ້ຖືກສ້າງຂຶ້ນເປັນ hybrid: ການອອກແບບສ່ວນໃຫຍ່ໄດ້ຖືກນໍາໃຊ້ໂດຍໃຊ້ UIKit-based MVP (Model-View-Presenter) screens, ໃນຂະນະທີ່ຄຸນນະສົມບັດໃຫມ່ແລະອິນເຕີເນັດໄດ້ຖືກຂຽນໃນ Swift ກັບ MVVM (Model-View-ViewModel). ພວກເຮົານໍາໃຊ້ລະດັບການບໍລິການເພື່ອ isolate logic ທຸລະກິດ: ຂໍຂອບໃຈ ຂໍຂອບໃຈ ພວກເຮົາມີວິທີການ "ການພັດທະນາ" ໃນຂະນະທີ່ພວກເຮົາໄດ້ນໍາໃຊ້ RxSwift, ຫຼັງຈາກນັ້ນໄດ້ເລີ່ມຕົ້ນການປ່ຽນແປງກັບ Combine, ແລະກັບການເລີ່ມຕົ້ນຂອງ async/await, ສ່ວນຂອງຊຸດໄດ້ປ່ຽນແປງໃນຂະນະທີ່ພວກເຂົາໄດ້ເລີ່ມຕົ້ນການປ່ຽນແປງໃນຂະນະທີ່ພວກເຂົາໄດ້ເລີ່ມຕົ້ນການປ່ຽນແປງໃນຂະນະທີ່ພວກເຂົາໄດ້ເລີ່ມຕົ້ນການປ່ຽນແປງໃນຂະນະທີ່ພວກເຂົາໄດ້ເລີ່ມຕົ້ນການປ່ຽນແປງໃນຂະນະທີ່ພວກເຂົາໄດ້ເລີ່ມຕົ້ນການປ່ຽນແປງໃນຂະນະທີ່ພວກເຂົາໄດ້ເລີ່ມຕົ້ນການປ່ຽນແປງໃນຂະນະທີ່ພວກເຂົາໄດ້ເລີ່ມຕົ້ນການປ່ຽນແປງ. CameraService BluetoothController AnalysisService ບົດຄວາມທັງຫມົດສາມາດຖືກຂຽນກ່ຽວກັບການທົດສອບ: ຈາກການກວດສອບສ່ວນບຸກຄົນຂອງການທົດສອບແລະໄດ້ຢ່າງງ່າຍດາຍສ້າງສະຖານທີ່ທີ່ຕ້ອງການໂດຍຜ່ານ (ໃນຂະນະທີ່ຂ້າພະເຈົ້າມີ on this topic), to simulating individual steps of the analysis and covering all of it with integration and unit tests. ProcessInfo ຊື່ຫຍໍ້ຂອງ : Small Technical Note ຂ້າພະເຈົ້າສືບຕໍ່ໄດ້ຮັບການປະທັບໃຈຂອງຂ້າພະເຈົ້າ, ຂ້າພະເຈົ້າສືບຕໍ່ໄດ້ຮັບການປະທັບໃຈຂອງຂ້າພະເຈົ້າ ການຄວບຄຸມ Analysis - ການຄົ້ນຄວ້າສູນກາງ: receives frames ແລະເລີ່ມຕົ້ນການປິ່ນປົວໃນ Frame Pipeline. ການບໍລິການ Camera - receives the raw frame stream from the camera, transforms it, and passes it forward. Microscope Controller – ການຄວບຄຸມການຄວບຄຸມຂອງ microscope. — a chain consisting of several stages: Frame Pipeline — correction, filtering Preprocessing — object/cell detection Detection — counting unique objects Counting — final filtering and preparation for visualization Postprocessing ອັດຕະໂນມັດ UI - ເປັນຜູ້ຊ່ຽວຊານໃນການສະແດງໃຫ້ເຫັນຜົນໄດ້ຮັບສໍາລັບຜູ້ໃຊ້ໃນເວລາທີ່ແທ້ຈິງ (ການກວດສອບແວ, ອັດຕະໂນມັດ, ອັດຕະໂນມັດ). Uploader — synchronizes analytics artifacts (snapshots, cells, config) ກັບ backend. ກ່ຽວກັບການປິ່ນປົວການປິ່ນປົວ: ພວກເຮົາເລີ່ມຕົ້ນໄດ້ນໍາໃຊ້ CocoaPods (ທີ່ໄດ້ເລີ່ມຕົ້ນ ຈາກ 2024), ແຕ່ຫຼັງຈາກນັ້ນໄດ້ນໍາສະເຫນີ SPM (Swift Package Manager). ການບໍລິການบางอย่าง (Computer Vision, Bluetooth, utilities) ໄດ້ຖືກຂົນສົ່ງໄປ SPM modules. ມັນຍັງມີປະສົບການທີ່ຈະກວດສອບລະຫັດ ObjC / C++ ໃນ xcframeworks individually, ແຕ່ບໍ່ມີເວລາຫຼາຍທີ່ຈະກວດສອບມັນທັງຫມົດ, ດັ່ງນັ້ນພວກເຮົາໄດ້ຂ້າງຂວາງລະຫັດນີ້ໃນໂຄງການຕົ້ນຕໍ. ObjC ໄດ້ຖືກຕ້ອງເປັນ wrapper ກ່ຽວກັບ C++ ເພື່ອໃຫ້ມັນສາມາດໄດ້ຮັບການໂທຈາກ Swift. ນີ້ໄດ້ຖືກນໍາໃຊ້ໃນລະຫັດ ObjC ++: ອັດຕະໂນມັດຂອງພວກເຂົາແມ່ນ purely ObjC, ເພື່ອໃຫ້ Swift ເພື່ອຮ່ວມມືກັບພວກເຂົາ, ໃນຂະນະທີ່ການນໍາໃຊ້ຂອງພວກເຂົາໄດ້ກວດສອບ ObjC ແລະ C++. ນີ້ແມ່ນ . ປະເພດການປົກປັກຮັກສາແລະການພັດທະນາທີ່ແທ້ຈິງ Swift ສະຫນັບສະຫນູນການໂທລະສັບມືຖືໃນ C++ ຂ້າພະເຈົ້າຈໍາເປັນຕ້ອງຊອກຫາວ່າຂ້າພະເຈົ້າບໍ່ແມ່ນ gurus ໃນ C++ ແລະ Computer Vision algorithms, ແຕ່ຄວາມຮັບຜິດຊອບຂອງຂ້າພະເຈົ້າປະກອບດ້ວຍການຊອກຫາຄວາມຮູ້ພື້ນຖານແລະ porting algorithms ແລະ heuristics ຈາກ Python, ເຊິ່ງແມ່ນສະຖານທີ່ທີ່ຫຼາຍທີ່ສຸດຂອງ R & D ຂອງພວກເຮົາໄດ້ຖືກນໍາໃຊ້. ພາສາລາວ ລະຫັດ QR One of the adapters exhibited an optical distortion artifact in the image. ໃນຖານະເປັນຜົນກະທົບ, cell that should appear round would look elongated or distorted, especially towards the edges of the frame. We used calibration with a chessboard grid and ເພື່ອປັບປຸງ geometry ຂອງ frame: ຊື່ຫຍໍ້ຂອງ : cv::undistort() We calibrate the camera — capturing images of a chessboard/grid with known geometry. OpenCV computes: the camera matrix K (projection parameters) distortion coefficients D = [k1, k2, p1, p2, k3, …] We apply cv::undistort() or cv::initUndistortRectifyMap() + remap(): this computes where each point “should have landed” in reality the image is “straightened” back to correct geometry ຫຼັງຈາກນັ້ນ, ອັດຕະໂນມັດໄດ້ຖືກປ່ຽນແປງ - ການເລີ່ມຕົ້ນນີ້ໄດ້ຫຼຸດຜ່ອນ. Determining Position on the Slide ການຄາດຄະເນດິນໃນ Slide ການຄາດຄະເນການຄາດຄະເນການຄາດຄະເນການຄາດຄະເນການຄາດຄະເນການຄາດຄະເນການຄາດຄະເນການຄາດຄະເນການຄາດຄະເນການຄາດຄະເນການຄາດຄະເນການຄາດຄະເນການຄາດຄະເນການຄາດຄະເນການຄາດຄະເນການຄາດຄະເນການຄາດຄະເນການຄາດຄະເນການຄາດຄະເນການຄາດຄະເນການຄາດຄະເນການຄາດຄະເນການຄາດຄະເນການຄາດຄະເນ here, you can see what happens when the shift determination is incorrect. video ໃນຕອນເລີ່ມຕົ້ນ, ພວກເຮົາໄດ້ທົດສອບການຄອມພິວເຕີຂອງການປ່ຽນແປງທີ່ກ່ຽວຂ້ອງລະຫວ່າງສອງແຜ່ນແລະກວດສອບການປ່ຽນແປງທີ່ບໍ່ເສຍຄ່າ. ພວກເຮົາໄດ້ທົດສອບປະເພດຕ່າງໆ: ວິທີການດາວໂຫລດຮູບພາບທີ່ດີເລີດໂດຍຜ່ານການ correlation phase ທີ່ຖືກສ້າງຕັ້ງຂຶ້ນໂດຍ Fast Fourier Transform. We implemented this in OpenCV and even used Apple Accelerate. ວິທີການທີ່ແຕກຕ່າງກັນທີ່ຖືກສ້າງຕັ້ງຂຶ້ນໂດຍ Keypoints Local ມີ Descriptors: SURF, SIFT, ORB ແລະອື່ນໆ. ປະເພດ Optical Flow ການນໍາໃຊ້ VPN ໃນ Apple VisionTranslationalImageRegistration On one hand, we had some assumptions: ບໍ່ມີ scaling ຫຼື rotations ມີ ອັດຕະໂນມັດ: ແຜ່ນສີຂາວ, ບໍ່ມີແຜ່ນ vacuum ນອກເຫນືອຈາກນີ້, ມີບັນຫາທີ່ກ່ຽວຂ້ອງກັບການປ່ຽນແປງໃນແສງສະຫວ່າງ, focus, errors accumulated, shifts abrupt, noise, or artifacts in the image. ການຄົ້ນຄວ້າແລະການຄົ້ນຄວ້າ Here is your accurate translation of the provided table and text: Method Advantages Disadvantages Usage Notes Speed Comment FFT + cross-correlation (OpenCV, Accelerate) Very fast, global shift detection, simple to implement Accumulates error, not robust to abrupt shifts Requires images of identical size, suitable for “pure” shifts Very high Used as the primary method SIFT High accuracy, scale/rotation invariant Slow, used to be non-free Excellent for diverse scenes with texture and complex transformations Slow Experimental option SURF Faster than SIFT, also scale/rotation invariant Proprietary, not always available Slightly better suited for real-time but still “heavy” Medium Experimental option, especially since under patent ORB Fast, free, rotation invariant Sensitive to lighting, not robust to scale changes Works fairly well for image stitching High Before we moved stitching to the cloud, we had versions using this Optical Flow (Lucas-Kanade) Tracks movement of points between frames, good for video Doesn’t handle global transformations, sensitive to lighting Best in videos or sequences with minimal movement Medium We experimented with this for digitization (stitching) of images Optical Flow (Farneback) Dense motion map, applicable to the whole image Slow, sensitive to noise Good for analyzing local motions within a frame Slow We experimented with this for digitization (stitching) of images Apple Vision (VNTranslationalImageRegistrationRequest) Very convenient API, fast, hardware-optimized In our case, accuracy was poor Perfect for simple use cases on iOS/macOS Very high We tried it and abandoned it FFT + cross-correlation (OpenCV, Accelerate) ຄວາມໄວສູງ, ການຢັ້ງຢືນການປ່ຽນແປງທົ່ວໂລກ, ການນໍາໃຊ້ງ່າຍ ການເກັບຮັກສາຄວາມຜິດພາດ, ບໍ່ມີຄວາມເຂັ້ມແຂງກັບການປ່ຽນແປງ abrupt Requires images of identical size, suitable for “pure” shifts ຂະຫນາດໃຫຍ່ ການນໍາໃຊ້ເປັນວິທີຕົ້ນຕໍ SIFT High accuracy, scale/rotation invariant ອັດຕະໂນມັດ ຄຸນນະສົມບັດທີ່ດີທີ່ສຸດສໍາລັບສະຖານທີ່ຕ່າງໆທີ່ມີຄຸນນະພາບແລະການປ່ຽນແປງທີ່ສົມບູນແບບ ປະເພດ ວິທີການທົດສອບ SURF ຄວາມໄວຫຼາຍກ່ວາ SIFT, ລວມທັງ scale / rotation invariant Proprietary, not always available ຄຸນນະສົມບັດທີ່ດີກວ່າສໍາລັບເວລາທີ່ແທ້ຈິງ, ແຕ່ຍັງ "ຄວາມເຂັ້ມແຂງ" ລະຫັດ QR ຄຸນນະສົມບັດການທົດສອບ, ໂດຍສະເພາະວ່າໃນຂະນະທີ່ພາຍໃຕ້ patent ORB ຄວາມໄວ, ຟຣີ, rotation invariant sensitive ກັບການແສງສະຫວ່າງ, ບໍ່ມີຄວາມເຂັ້ມແຂງກັບການປ່ຽນແປງຂະຫນາດ ຄຸນນະສົມບັດທີ່ດີທີ່ສຸດສໍາລັບການ Stitching Image ປະເພດ ຫຼັງຈາກທີ່ພວກເຮົາມີການນໍາໃຊ້ cloud, ພວກເຮົາມີການນໍາໃຊ້ Optical Flow (Lucas-Kanade) ການເດີນທາງຂອງ points ໃນລະຫວ່າງ frames, ທີ່ດີສໍາລັບການວິດີໂອ ບໍ່ປິ່ນປົວການປ່ຽນແປງທົ່ວໂລກ, sensitive ກັບແສງສະຫວ່າງ ປະສິດທິພາບທີ່ດີທີ່ສຸດໃນວິດີໂອຫຼື sequence ມີການຂົນສົ່ງຕ່ໍາ ລະຫັດ QR ພວກເຮົາມີປະສົບການນີ້ສໍາລັບການ digitization (stitching) ຂອງຮູບພາບ Optical Flow (Farneback) ຮູບພາບ ສໍາ ລັບ Density Motion Map, applicable to the entire image ຂັ້ນຕອນ, sensitive ກັບຄວາມຮ້ອນ ຄຸນນະສົມບັດທີ່ດີສໍາລັບການທົດສອບສະພາບແວດລ້ອມພາຍໃນ frame ປະເພດ ພວກເຮົາມີປະສົບການນີ້ສໍາລັບການ digitization (stitching) ຂອງຮູບພາບ Apple Vision (VNTranslationalImageRegistrationRequest) API ທີ່ດີທີ່ສຸດ, ຄວາມໄວສູງ, ທີ່ດີທີ່ສຸດສໍາລັບອຸປະກອນ ໃນກໍລະນີຂອງພວກເຮົາ, ຄວາມແມ່ນຍໍາ ທີ່ດີທີ່ສຸດສໍາລັບກໍລະນີການນໍາໃຊ້ຢ່າງງ່າຍດາຍໃນ iOS / macOS ຂະຫນາດໃຫຍ່ ພວກເຮົາໄດ້ທົດສອບມັນແລະດໍາເນີນການ ສໍາລັບແຕ່ລະອຽດ, ພວກເຮົາໄດ້ຊອກຫາຄຸນນະສົມບັດທີ່ດີທີ່ສຸດໃນຄວາມຖືກຕ້ອງແລະຜົນປະໂຫຍດສໍາລັບການຕັດສິນໃຈ: ພວກເຮົາແຕກຕ່າງກັນການຕັດສິນໃຈຂອງຮູບພາບ, parameter algorithm, ແລະຄຸນນະສົມບັດທີ່ແຕກຕ່າງກັນຂອງການຕັດສິນໃຈຂອງການຕັດສິນໃຈແລະ microscope. ແລະນີ້ແມ່ນວິທີການ debugging ສໍາ ລັບການຊອກຫາທີ່ສໍາຄັນ, ທີ່ພວກເຮົາມີຄວາມຕ້ອງການທີ່ຈະນໍາໃຊ້ສໍາລັບການຄອມພິວເຕີຂອງການປ່ຽນແປງ. ໃນຖານະເປັນຜົນປະໂຫຍດ, ໃນຂະນະທີ່ລະດັບ robotic ໄດ້ຖືກນໍາໃຊ້ໃນລະບົບຂອງພວກເຮົາ, ພວກເຮົາເລີ່ມຕົ້ນການນໍາໃຊ້ coordinates ຈາກການຄວບຄຸມຂອງຕົນ, ທີ່ພວກເຮົາມີການປັບປຸງໂດຍໃຊ້ CV heuristics. ລະຫັດ QR ໃນຖານະເປັນ, ການເຮັດວຽກຂອງການກວດສອບແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແ ການຢັ້ງຢືນ Object. ພວກເຮົາມີການນໍາໃຊ້ເຄືອຂ່າຍ neuronal ເພື່ອຢັ້ງຢືນ Objects ໃນ frame (Bounding Box, BB). Each BB has its own confidence score (network confidence) and cell class. ສໍາລັບການປິ່ນປົວຄວາມປອດໄພແລະຄວາມປອດໄພ false, ພວກເຮົາມີຄວາມປອດໄພຢ່າງໄວວາ: ຮູບພາບ ສໍາ ລັບ ການ ນໍາ ໃຊ້ ລະ ບົບ ລະ ບົບ ລະ ບົບ ລະ ບົບ ລະ ບົບ ລະ ບົບ ລະ ບົບ ລະ ບົບ ລະ ບົບ ລະ ບົບ ລະ ບົບ ລະ ບົບ ຢ່າງໃດກໍຕາມ, ຮູບເງົາສີໄດ້ເລີ່ມຕົ້ນຫຼັງຈາກນັ້ນ, ແລະມັນໄດ້ຖືກກັ່ນຕອງ. ແສງສະຫວ່າງແສງແສງແສງແສງແສງແສງແສງແສງແສງແສງແສງແສງແສງແສງແສງແສງແສງແສງແສງແສງແສງແສງແສງແສງແສງແສງ geometric: we discard objects whose sizes fall outside typical cell dimensions. we also discard cells that partially extend beyond the frame edges — those are of no interest to us Counting unique objects. Some BBs may be counted more than once for the same cell, so it’s important to detect such cases and count them only once. At one point, we were inspired by a guide from MTurk that describes two options: Option 1: Compare the distances between BB centers — if a new BB is too close to one already recorded, it’s likely “the same” cell. Option 2: Calculate IoU (intersection over union, Jaccard Index) — the metric for overlap between rectangles. If a new BB overlaps significantly with an existing one, we count it only once. ໃນປັດຈຸບັນ, ມັນເປັນສິ່ງທີ່ສໍາຄັນທີ່ຈະຄົ້ນຄວ້າສະຖານທີ່ຂອງສະພາບແວດລ້ອມໃນໄລຍະຮູບເງົາ, ໂດຍສະເພາະວ່າພວກເຮົາກໍາລັງຊອກຫາໃນໄລຍະການກວດສອບທີ່ຜ່ານມາຂອງສະພາບແວດລ້ອມ. ໃນປັດຈຸບັນ, ມັນເປັນສິ່ງທີ່ສໍາຄັນທີ່ຈະຄົ້ນຄວ້າສະຖານທີ່ຂອງສະພາບແວດລ້ອມໃນໄລຍະການກວດສອບ. ລະຫັດ QR ຮູບພາບ ສໍາ ລັບ ການ ດາວ ນ ໌ ອອນ ໄລ ນ ໌ ວັນ ທີ ການ ສ້າງ ຕັ້ງ ສະ ເພາະ ສໍາ ລັບ lovers ສັດ ລ້ຽງ. ບໍ່ ວ່າ ຈະ ເປັນ ທ່ານ ກໍາ ລັງ ຊອກ ຫາ ຄູ່ ຮ່ວມ ງານ ຂອງ ຊີ ວິດ, buddy ສໍາ ລັບ ສັດ ລ້ຽງ ຫຼື ພຽງ ແຕ່ ຜູ້ ໃດ ຜູ້ ຫນຶ່ງ ຂອງ ທ່ານ ທີ່ ຈະ ວາງ ສາຍ ອອກ ກັບ, ທີ່ ນີ້ ທ່ານ ຈະ ສາ ມາດ ຊອກ ຫາ ໄດ້ ຜູ້ ທີ່ ທ່ານ ກໍາ ລັງ ຊອກ ຫາ ຄູ່ ຮ່ວມ ງານ ຂອງ ຊີ ວິດ. ການເດີນທາງຂອງ field of view ໃນໄລຍະ smar ໃນປັດຈຸບັນ, ການຄາດຄະເນດິນທີ່ຖືກຄາດຄະເນດິນທີ່ຖືກຄາດຄະເນດິນທີ່ຖືກຄາດຄະເນດິນທີ່ຖືກຄາດຄະເນດິນທີ່ຖືກຄາດຄະເນດິນທີ່ຖືກຄາດຄະເນດິນທີ່ຖືກຄາດຄະເນດິນທີ່ຖືກຄາດຄະເນດິນທີ່ຖືກຄາດຄະເນດິນ. ຖ້າຫາກວ່າທ່ານກໍາລັງຊອກຫາຂໍ້ມູນເພີ່ມເຕີມກ່ຽວກັບວິທີການນີ້, ທ່ານສາມາດຊອກຫາຂໍ້ມູນເພີ່ມເຕີມກ່ຽວກັບວິທີການນີ້. ນີ້ແມ່ນສິ່ງທີ່ການທົດສອບຄັ້ງທໍາອິດໄດ້ສະແດງໃຫ້ເຫັນວ່າ: ການກວດສອບພື້ນທີ່, ການຊອກຫາ, ຄວາມແຕກຕ່າງໃນແສງສະຫວ່າງ, ສະຫນາມບິນ. ໃນຕອນແລງ - ບັດທີ່ມີຄວາມຍາວທີ່ບໍ່ຄົງແລະອຸປະກອນ, ໃນເວລາທີ່ "ຊັ້ນ" ແມ່ນຖືກເບິ່ງຢູ່ໃນການເຊື່ອມຕໍ່ຂອງ frame. ໃນຕອນແລງ - ຮູບພາບອຸປະກອນທີ່ບໍ່ຄົງທີ່ມີຜູ້ນໍາ. ຖ້າຫາກວ່າທ່ານກໍາລັງຊອກຫາຮູບພາບນີ້, ທ່ານສາມາດຊອກຫາຮູບພາບທີ່ດີທີ່ສຸດທີ່ທ່ານກໍາລັງຊອກຫາສໍາລັບຮູບພາບທີ່ດີທີ່ສຸດ. ຮູບພາບ ສໍາ ລັບ Blurred Frames Overlayed On The Scan During Abrupt Movement ຂໍຂອບໃຈວ່າພວກເຮົາມີຄວາມປອດໄພແລະຄວາມປອດໄພຂອງພວກເຮົາ. ພວກເຮົາ ກໍາ ລັງເຮົາມີຄວາມຄິດສ້າງສັນທີ່ດີທີ່ສຸດ ສໍາ ລັບຜູ້ຊ່ຽວຊານໃນການຄົ້ນຄວ້າແລະການຄົ້ນຄວ້າຄອມພິວເຕີ. ຂ້າງລຸ່ມນີ້ແມ່ນຕົວຢ່າງຂອງວິທີທີ່ພວກເຮົາມີຜົນປະໂຫຍດຄວາມໄວການປິ່ນປົວຂອງ components frame-processing ອັດຕະໂນມັດທີ່ແຕກຕ່າງກັນໂດຍຜ່ານການຄຸ້ມຄອງ: ການຕັ້ງຄ່າ camera, algorithms ເລືອກ, ແລະຄຸນນະສົມບັດຂອງພວກເຂົາ. ການເຮັດວຽກທີ່ມີລະດັບ motorized ໃນປັດຈຸບັນ - ຂໍ້ມູນກ່ຽວກັບການເຊື່ອມຕໍ່ລະຫວ່າງ iPhone ແລະສະຖານທີ່ motorized: ວິທີການຂົນສົ່ງໂດຍຜ່ານ BLE, ຄໍາຖາມທີ່ພວກເຮົາສົ່ງ, ແລະວິທີການຕິດຕັ້ງອັດຕະໂນມັດ. ການອຸປະກອນໂທລະສັບມືຖືເຊື່ອມຕໍ່ໂດຍຜ່ານ Bluetooth ກັບການຄວບຄຸມໃນສະຖານທີ່ແລະຂົນສົ່ງໂດຍຜ່ານ coordinates XYZ. ຂໍຂອບໃຈຫຼາຍ, ມັນແມ່ນສະຖານທີ່ຕົນເອງທີ່ຂົນສົ່ງ, ແຕ່ຈາກສະຖານທີ່ຂອງຮູບພາບທີ່ເບິ່ງໂດຍຜ່ານ lens ຂອງສະຖານທີ່ໂທລະສັບມືຖື, ມັນຄ້າຍຄືກັບການຂົນສົ່ງທີ່ເກີດຂຶ້ນໂດຍຜ່ານ slide. ພວກເຮົາມີຫ້ອງການອອກແບບແລະສ້າງການອອກແບບຂອງພວກເຮົາມີຫຼາຍກວ່າ $ 800 ຂອງພວກເຮົາ. ມັນໄດ້ຖືກສ້າງຂຶ້ນຢ່າງກວ້າງຂວາງຢ່າງງ່າຍດາຍ, ໃນຂະນະທີ່ຫນຶ່ງໃນວິສະວະກອນໄດ້ຊອກຫາໃນເວລາທີ່ການອອກແບບຂອງ microscope motorized ມີຄວາມຮູ້ສຶກວ່າການອອກແບບຂອງເຄື່ອງພິມ 3D ມີຄວາມຮູ້ສຶກທີ່ຮູ້ສຶກວ່າໄດ້ຖືກສ້າງຕັ້ງຂຶ້ນ. ຄຸນນະສົມບັດ XYZ ທີ່ແຕກຕ່າງກັນ, motors stepper ທີ່ແຕກຕ່າງກັນ, rails ທີ່ແຕກຕ່າງກັນ. ໃນປັດຈຸບັນ, ພວກເຮົາມີການນໍາໃຊ້ components ທີ່ຖືກຜະລິດຢ່າງກວ້າງຂວາງແລະບໍ່ມີຄ່າໃຊ້ຈ່າຍ, ແຕ່ໄດ້ຮັບການປັບປຸງຢ່າງກວ້າງຂວາງສໍາລັບຄວາມຕ້ອງການຂອງພວກເຮົາ. ການອອກແບບຂອງການອອກແບບແມ່ນປະກອບດ້ວຍສາມສ່ວນ: ອຸປະກອນຂອງລະດັບ microscope motorized ພວກເຮົາໃຊ້ joystick virtual ສໍາລັບການປ່ຽນແປງລະດັບມືອາຊີບ (ລັກສະນະຂອງການປ່ຽນແປງສໍາລັບຜູ້ໃຊ້) - ມັນຖືກນໍາໃຊ້ໃນສະຖານະການການເຄື່ອນໄຫວແລະການຕິດຕັ້ງລະບົບ. ຢ່າງໃດກໍຕາມ, ໃນໄລຍະການທົດສອບ, ການຄວບຄຸມແມ່ນປົກກະຕິເປັນອັດຕະໂນມັດ. ນີ້ແມ່ນວິທີທີ່ joystick ໄດ້ເຮັດວຽກໃນອຸປະກອນທໍາອິດ - ຫຼັງຈາກນັ້ນ, ພວກເຮົາມີຄວາມປັບປຸງກັບການປິ່ນປົວຂອງ Sound ແລະ Delay. Communication Protocol ລະຫັດ QR ໃນຖານະເປັນ interface Bluetooth, ພວກເຮົາມີການນໍາໃຊ້ ໂມດູນ BLE ແມ່ນເຮັດວຽກໂດຍປົກກະຕິໃນ mode terminal text, ເຊິ່ງເປັນຄວາມຕ້ອງການແລະຄໍາຮ້ອງສະຫມັກພຽງແຕ່ຜ່ານມາແລະໄປ. ສໍາລັບການຄຸ້ມຄອງແລະການເຮັດວຽກລະບົບ (ການປ່ຽນແປງຊື່, ຄວາມໄວການສື່ສານ), ການຄຸ້ມຄອງ AT ແມ່ນຖືກນໍາໃຊ້. ລະຫັດ QR ການຄວບຄຸມຕົນເອງເຮັດວຽກ firmware ທີ່ຖືກສ້າງຕັ້ງຂຶ້ນໃນ GRBL, ໂດຍໃຊ້ ຄໍາຮ້ອງສະຫມັກ. ຄໍາຮ້ອງສະຫມັກຕົ້ນຕໍນີ້ແມ່ນ: ລະຫັດ QR ການເລີ່ມຕົ້ນການເຊື່ອມຕໍ່ (ໂທລະສັບຈໍາເປັນຕ້ອງກວດສອບວ່າສະຖານທີ່ແມ່ນເຊື່ອມຕໍ່) ດາວນ໌ໂຫລດໂທລະສັບມືຖື stopping/resuming scanning ການປິ່ນປົວສະພາບອາກາດທີ່ກໍານົດໄວ້: ການປິ່ນປົວການປິ່ນປົວການປິ່ນປົວ, ການປິ່ນປົວການປິ່ນປົວການປິ່ນປົວ, ການປິ່ນປົວການປິ່ນປົວການປິ່ນປົວການປິ່ນປົວການປິ່ນປົວ. GRBL ມີຊຸດຄົ້ນຄວ້າຂອງຕົນເອງທີ່ເລີ່ມຕົ້ນດ້ວຍ ລະຫັດ QR $ $H — homing ຫຼື calibration ແລະຊອກຫາອຸປະກອນ zero via limit switches. ຄຸນນະສົມບັດໂດຍໃຊ້ເວລາທີ່ເລີ່ມຕົ້ນແລະຫຼັງຈາກນັ້ນຫຼັງຈາກນັ້ນຫຼັງຈາກນັ້ນຫຼັງຈາກນັ້ນຫຼັງຈາກນັ້ນຫຼັງຈາກນັ້ນຫຼັງຈາກນັ້ນຫຼັງຈາກນັ້ນຫຼັງຈາກນັ້ນຫຼັງຈາກນັ້ນຫຼັງຈາກນັ້ນຫຼັງຈາກນັ້ນຫຼັງຈາກນັ້ນຫຼັງຈາກນັ້ນຫຼັງຈາກນັ້ນ. — Jogging mode, which simulates joystick control. The command itself should describe relative movement along all axes. An example of such a command: $J=<command> $J=G21G91Y1F10 — units in millimeters G21 — relative positioning G91 — movement along the Y-axis by 1 millimeter Y1 — movement speed. F10 ? — GRBL ລະບົບການຄົ້ນຄວ້າ. ສະຫນັບສະຫນູນ string ທີ່ມີຄຸນນະສົມບັດທີ່ສໍາຄັນຂອງເຄື່ອງ. ປະເພດການຕອບ: <Alarm FhMPos:0.000,0.000,0.000 FFS:0,0 FPn:XYZ FPWCO:-5.300,0.000,-2.062> ພວກເຮົາມີຄວາມຮູ້ສຶກກ່ຽວກັບສອງປັດຈຸບັນ: ມັນສາມາດເປັນ “Idle,” “Running,” ຫຼື “Alarm.” MPos - ສະຖານທີ່ໃນປັດຈຸບັນຂອງສະຖານທີ່. ຂ້າພະເຈົ້າບໍ່ໄດ້ຂໍຂອບໃຈຫຼາຍກ່ວາ GRBL ແລະ protocols ການຄວບຄຸມລະດັບ - ນີ້ແມ່ນອຸປະກອນສໍາລັບບົດຄວາມທີ່ແຕກຕ່າງກັນ. ຂໍຂອບໃຈ: GRBL ແມ່ນອຸປະກອນລະດັບ open-source ຈາກໂລກ CNC, ທີ່ເຫມາະສົມສໍາລັບການຄວບຄຸມລະບົບ three-axis (XY + Z) ໂດຍຜ່ານການຄຸ້ມຄອງ G-code ທີ່ງ່າຍທີ່ສຸດ. ພວກເຮົາມີການເລືອກທີ່ງ່າຍທີ່ສຸດ BLE module - HC-08 - ເພື່ອປ້ອງກັນການເຮັດວຽກກັບ MFi ແລະ iAP. ມັນເປັນສິ່ງທີ່ສໍາຄັນສໍາລັບພວກເຮົາມີວ່າ iPhone ສາມາດສົ່ງການຄຸ້ມຄອງຢ່າງວ່ອງໄວແລະໄດ້ຮັບການປັບປຸງສະພາບແວດລ້ອມທີ່ມີຄວາມງ່າຍດາຍຕ່ໍາ, ໂດຍບໍ່ມີການເພີ່ມເຕີມຄ່າໃຊ້ຈ່າຍຂອງຊຸດ. Tasks ອັດຕະໂນມັດ ທີ່ຜ່ານມາ, ຂ້າພະເຈົ້າໄດ້ຂຽນກ່ຽວກັບການ focusing. ການປິ່ນປົວນີ້ຖືກນໍາໃຊ້ຢ່າງກວ້າງຂວາງໃນໄລຍະການກວດສອບການກວດສອບ, ເນື່ອງຈາກວ່າຕົວຢ່າງແມ່ນຖືກນໍາໃຊ້ຢ່າງບໍ່ເຄືອບ, ເຊິ່ງແມ່ນຢ່າງກວ້າງຂວາງໃນການຂະຫຍາຍຕົວສູງ. ມັນເປັນສິ່ງທີ່ຈໍາເປັນເພື່ອຄວບຄຸມລະດັບຂອງ blur ແລະປິ່ນປົວການກວດສອບໃນເວລາ. ນີ້ແມ່ນວິທີການເຮັດວຽກ. ຮູບພາບ ສໍາ ລັບ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ ສະ ຫນູນ Scanning ຂ້າພະເຈົ້າໄດ້ຂຽນຂ້າງລຸ່ມນີ້ກ່ຽວກັບການດາວໂຫລດການດາວໂຫລດໃນຕອນແລງຂອງໂທລະສັບມືຖື. ມັນເປັນສິ່ງທີ່ຄວນຮູ້ທີ່ນີ້ວ່າການດາວໂຫລດສາມາດໄດ້ຮັບການດາວໂຫລດໃນຂະຫນາດໃຫຍ່ທີ່ແຕກຕ່າງກັນ: ຈາກ 5x ກັບ 40x. ໃນລະດັບການດາວໂຫລດຕ່ໍາ, ມັນງ່າຍດາຍທີ່ຈະ navigate ແລະກວດສອບເສັ້ນທາງຂອງການດາວໂຫລດ, ໃນຂະນະທີ່ໃນຂະຫນາດໃຫຍ່ທີ່ສຸດ, ຂໍ້ມູນຂອງໂທລະສັບມືຖືໄດ້ຖືກເບິ່ງ. ໃນກໍລະນີຂອງພວກເຮົາ, ພວກເຮົາເຮັດວຽກໃນສອງລະດັບ: Boundary detection at 4x magnification. The algorithm scans the entire slide, determines the smear area, and generates a boundary map for the next stage. The output is something like a heat map. For example, from the low-magnification image on the left, we obtain a matrix that we then use to plan the steps for navigating at higher magnification: Scanning the smear at 20x magnification (or another level). The algorithm scans and saves images for subsequent assembly into a single map. Scanning proceeds line by line, within the boundaries of the smear. A photo is captured for stitching when: the image is in focus the controller is in an idle state, i.e., not moving ເພື່ອໃຫ້ຜູ້ໃຊ້ບໍ່ຈໍາເປັນຕ້ອງຈຸດປະສົງທຸກເວລາ, ພວກເຮົາມີການກວດສອບແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ່ນແຜ ພາສາລາວ ການໂຄງການນີ້ສະແດງໃຫ້ເຫັນວ່າເຖິງແມ່ນວ່າໂທລະສັບມືຖືຈາກປີ 2018 ສາມາດປິ່ນປົວການເຮັດວຽກທີ່ຜ່ານມາຕ້ອງການ desktop, servers, ແລະ microscopes ອັດຕະໂນມັດທີ່ຍິ່ງໃຫຍ່. ເນື່ອງຈາກວ່າ, ມັນຍັງມີຫຼາຍກ່ວາສະຖານທີ່: ຈາກການກວດສອບ dataset ເພື່ອປັບປຸງອຸປະກອນການ. ຖ້າຫາກວ່າທ່ານມີຄວາມສຸກ, ຂໍຂອບໃຈວ່າຈະກວດສອບທີ່ແຕກຕ່າງກັນ. ກະລຸນາຖ້າຫາກວ່າຖ້າຫາກວ່າທ່ານສາມາດຊອກຫາຄໍາຖາມ, ຂຽນປະສົບການຂອງທ່ານເອງ, ແລະຂໍຂອບໃຈວ່າພວກເຮົາຈະສ້າງການປິ່ນປົວຫຼັງຈາກນັ້ນຫຼັງຈາກນັ້ນຫຼັງຈາກນັ້ນຫຼັງຈາກນັ້ນຫຼັງຈາກນັ້ນຫຼັງຈາກນັ້ນ. ຂໍຂອບໃຈສໍາລັບການອ່ານ! ພວກເຮົາຈະເຊື່ອມຕໍ່! ການ Ansar ຊື່ຫຍໍ້ຂອງ : ansaril3g@gmail.com ຊື່ຫຍໍ້ຂອງ : Ansar Zhalyal ຊື່ຫຍໍ້ຂອງ : @celly_ai ອາເມລິກາ Email: amin.benarieb@gmail.com ຊື່ຫຍໍ້ຂອງ : Amin Benarieb ຊື່ຫຍໍ້ຂອງ : @aminbenarieb