
6,348 reads
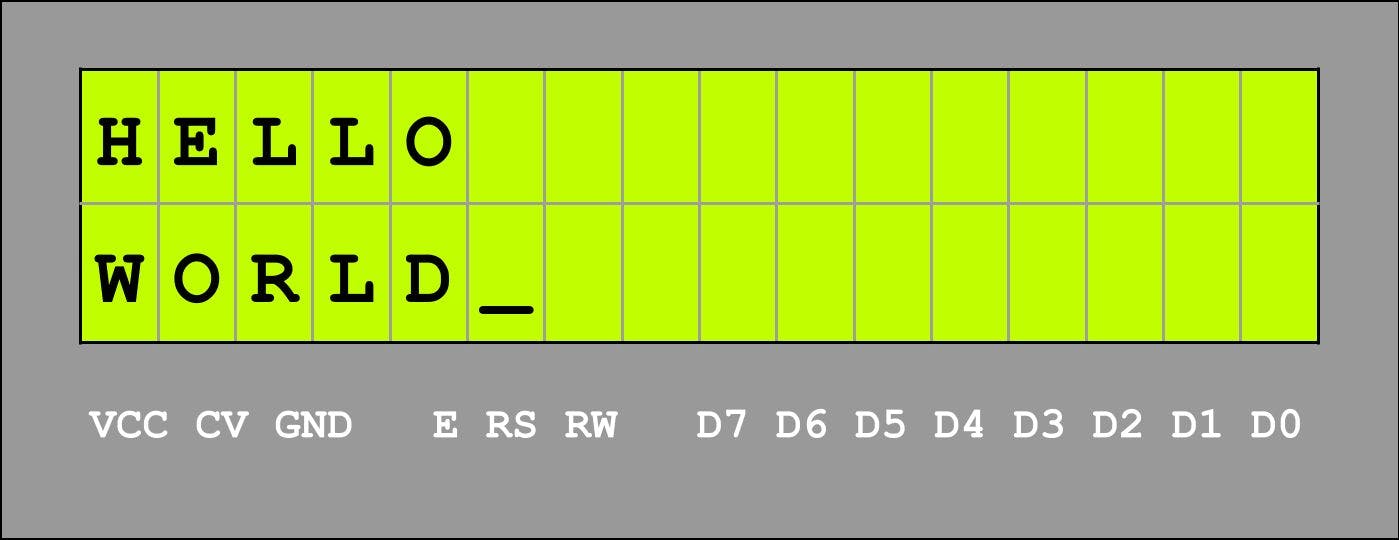
How to Interface the 8051 MCU with an LCD Display
by byDanielle Gruber@daniellegruber
byDanielle Gruber@daniellegruber
Freshman at Yale majoring in electrical engineering. Interested in neuroscience, CS, math, and everything in-between!
January 21st, 2022





Freshman at Yale majoring in electrical engineering. Interested in neuroscience, CS, math, and everything in-between!


Freshman at Yale majoring in electrical engineering. Interested in neuroscience, CS, math, and everything in-between!
About Author

Freshman at Yale majoring in electrical engineering. Interested in neuroscience, CS, math, and everything in-between!
Comments









![Adventures in Assembly #1 [How It Usually Begins]](https://images.unsplash.com/photo-1532882871449-7fbb1ec36d48?ixlib=rb-1.2.1&q=80&fm=jpg&crop=entropy&cs=tinysrgb&w=1080&fit=max&ixid=eyJhcHBfaWQiOjEwMDk2Mn0&auto=format)

![Bypassing SSL Pinning with LLDB on AppStore iOS apps [A Step by Step Guide]](https://images.unsplash.com/photo-1544890225-2f3faec4cd60?ixlib=rb-1.2.1&q=80&fm=jpg&crop=entropy&cs=tinysrgb&w=1080&fit=max&ixid=eyJhcHBfaWQiOjEwMDk2Mn0&auto=format)

![[CTF Series #1] The Reverse Engineering Challenge](https://firebasestorage.googleapis.com/v0/b/hackernoon-app.appspot.com/o/images%2F4wIVYgFfSifbXBgRGcYBelED8Nn2-kl628t2.jpeg?alt=media&token=ee7118d5-f29f-469f-b20b-70b14e0a57bf&auto=format&fit=max&w=3840)
