9,981 reads
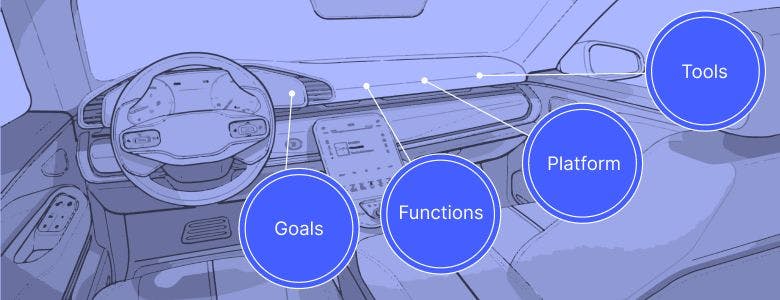
Finding the Right Development Tool and Platform for a Vehicle HMI
by
March 22nd, 2023






Story's Credibility


Story's Credibility
About Author

Making vehicles already 14 years and like swimming
Comments

Making vehicles already 14 years and like swimming