
12,740 reads
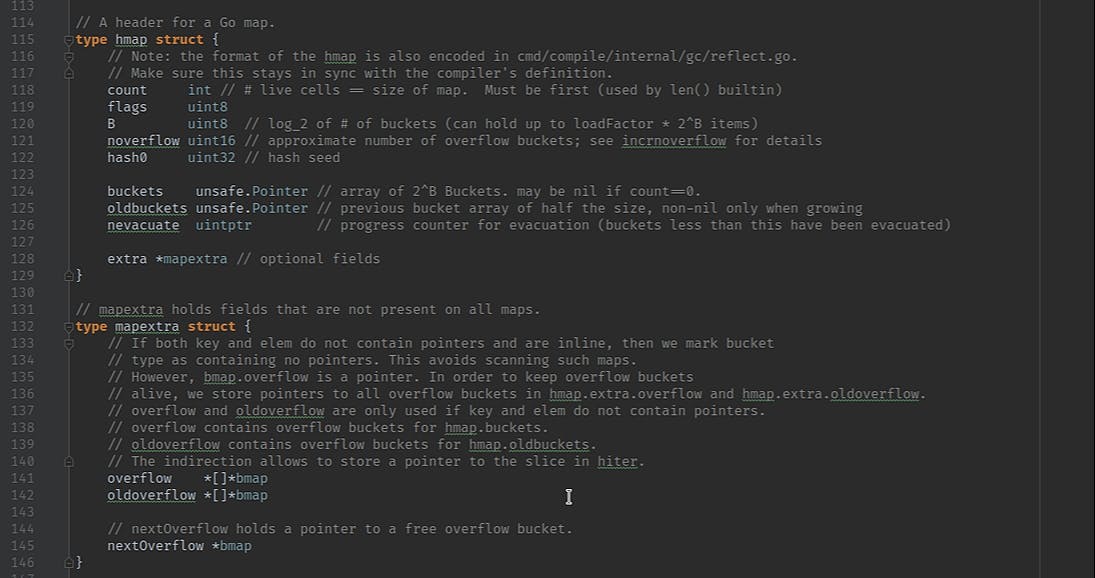
Some insights on Maps in Golang
by
March 1st, 2020





Audio Presented by



About Author

Go developer. Blockchain expert.
Comments

TOPICS





Related Stories










104 Stories To Learn About Go
May 03, 2023
Go developer. Blockchain expert.
May 03, 2023
May 03, 2023