813 reads
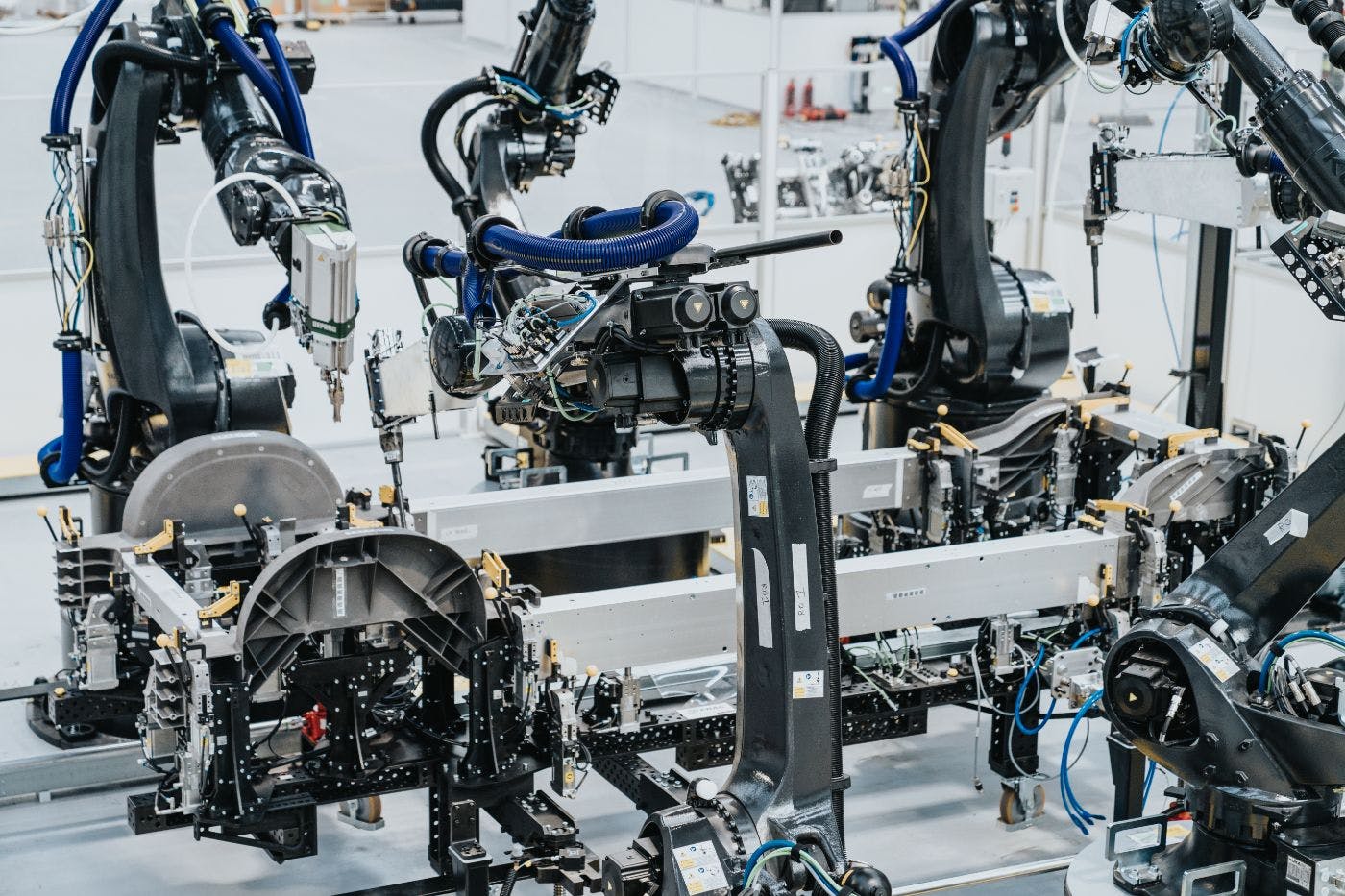
Sensor-based Control in Cobots: Its Opportunities and Challenges
by byRavi Kumar@ravikr
byRavi Kumar@ravikr
I work as a independent Research Analyst. We deal in syndicated, custom, and consulting market studies.
August 16th, 2022






I work as a independent Research Analyst. We deal in syndicated, custom, and consulting market studies.


I work as a independent Research Analyst. We deal in syndicated, custom, and consulting market studies.
About Author
I work as a independent Research Analyst. We deal in syndicated, custom, and consulting market studies.
Comments