
This story draft by @escholar has not been reviewed by an editor, YET.
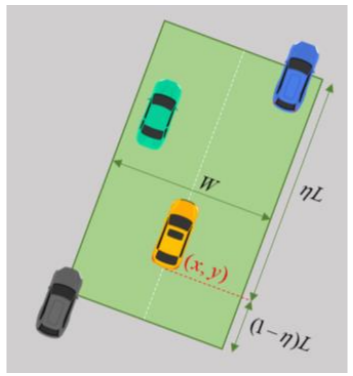
Determining the Local Density Around a Vehicle Using a Moving Rectangle


We publish the best academic work (that's too often lost to peer reviews & the TA's desk) to the global tech community
Story's Credibility


We publish the best academic work (that's too often lost to peer reviews & the TA's desk) to the global tech community
Story's Credibility
About Author

We publish the best academic work (that's too often lost to peer reviews & the TA's desk) to the global tech community




