
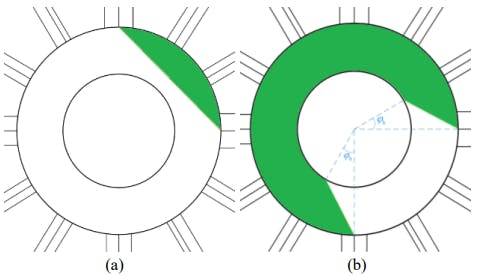
Optimalisering van voertuigvloei in komplekse rotondes: OD-korridors en gewenste oriëntasies
by byEScholar: Electronic Academic Papers for Scholars@escholar
byEScholar: Electronic Academic Papers for Scholars@escholar
We publish the best academic work (that's too often lost to peer reviews & the TA's desk) to the global tech community
2024/09/02


















We publish the best academic work (that's too often lost to peer reviews & the TA's desk) to the global tech community
Story's Credibility


We publish the best academic work (that's too often lost to peer reviews & the TA's desk) to the global tech community
Story's Credibility
About Author

We publish the best academic work (that's too often lost to peer reviews & the TA's desk) to the global tech community
KOMMENTAAR

HANG TAGS
HIERDIE ARTIKEL IS AANGEBIED IN



Related Stories




Thrilled to be Recognized as Startup of the Year in New York City

@blairsilverberg
Jan 20, 1970


Thrilled to be Recognized as Startup of the Year in New York City
@blairsilverberg
Jan 20, 1970