1,310 reads
How to Make a Cost-effective Flexible Robotic Solution for Low-volume Production
by byVasilii Mishchenko@vasiliirobotech
byVasilii Mishchenko@vasiliirobotech
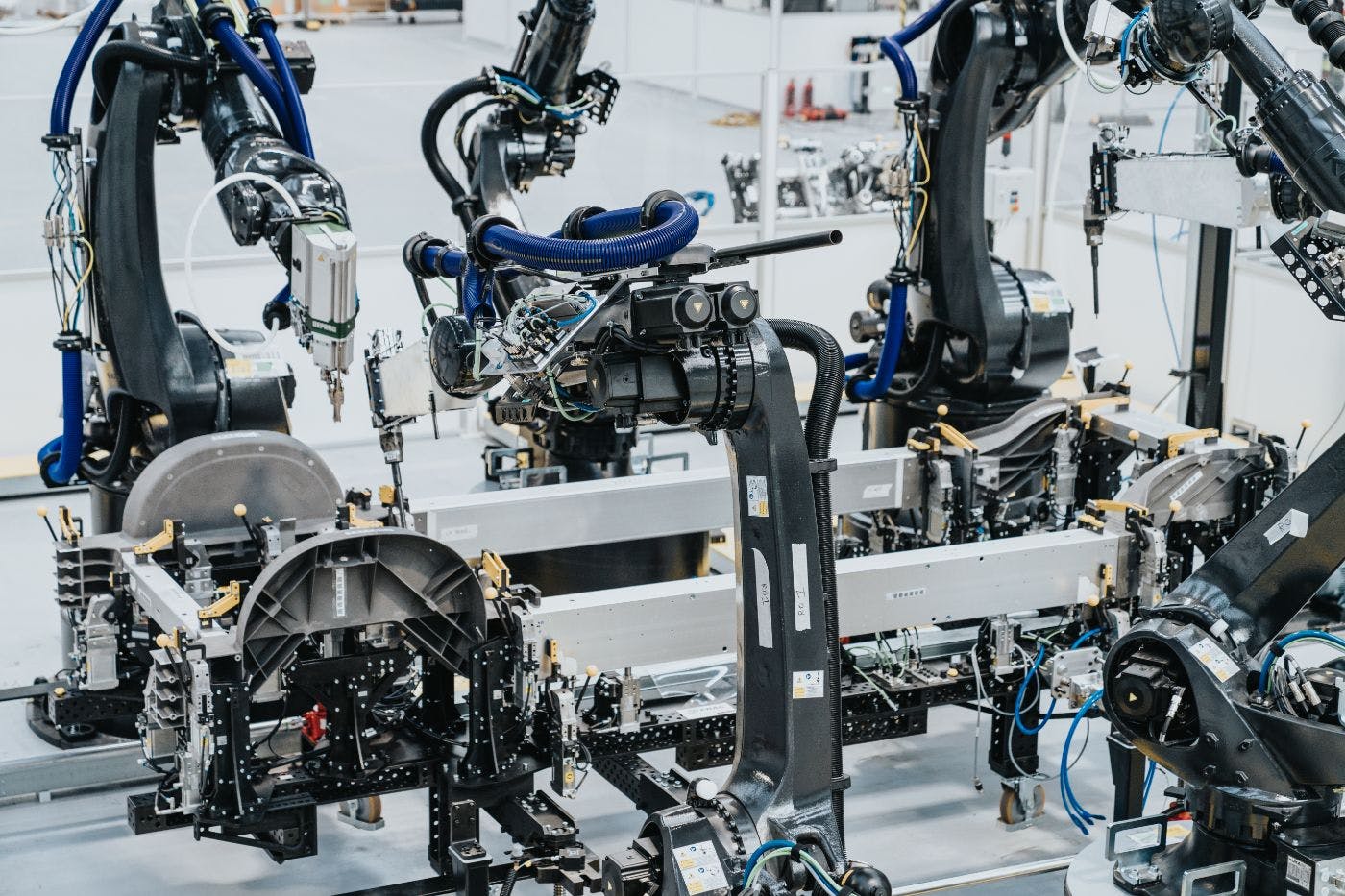
I’m creating a new way of manufacturing - an autonomous scalable, software-defined, product-agnostic robotic factory
March 17th, 2023





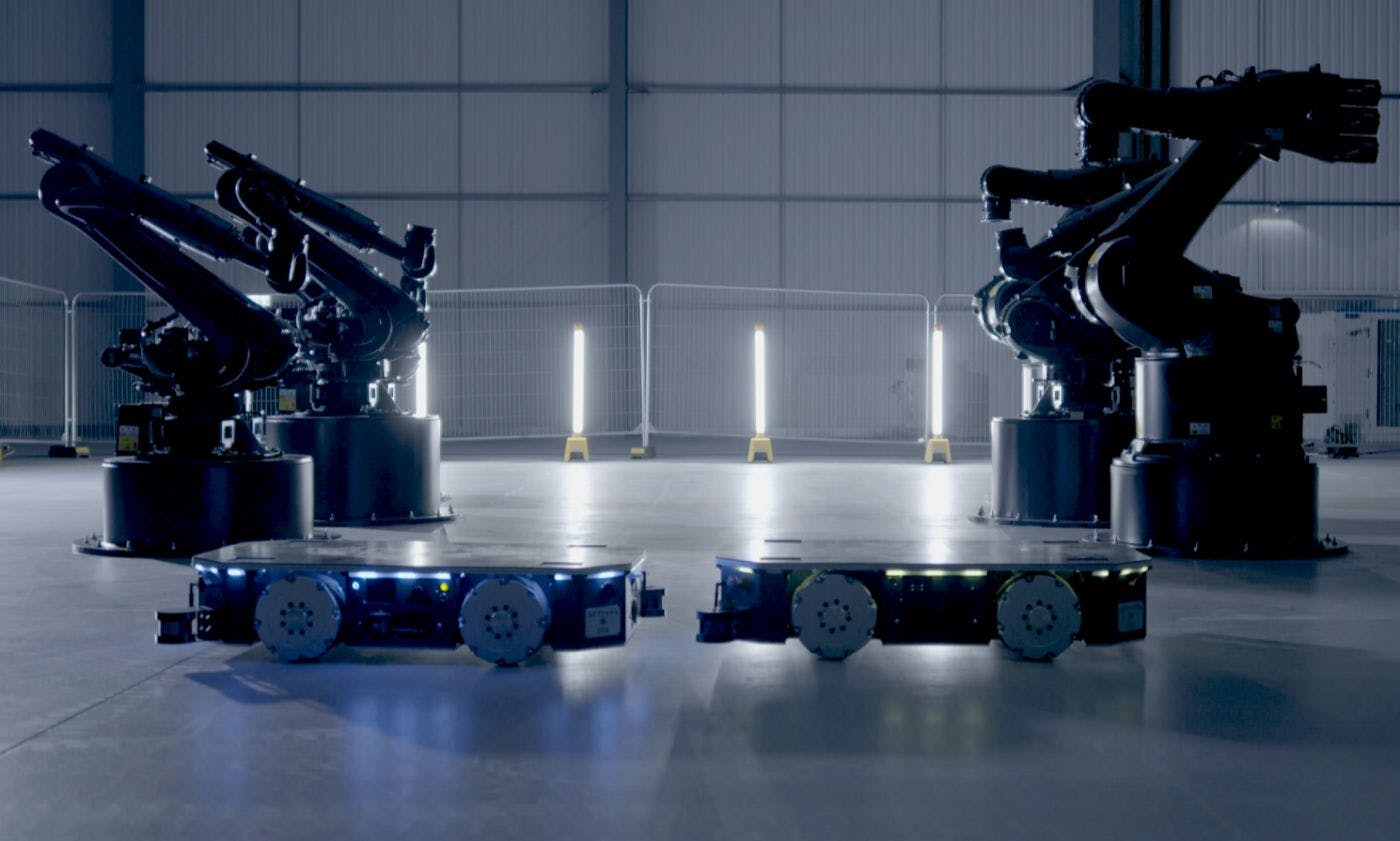
I’m creating a new way of manufacturing - an autonomous scalable, software-defined, product-agnostic robotic factory


I’m creating a new way of manufacturing - an autonomous scalable, software-defined, product-agnostic robotic factory
About Author

I’m creating a new way of manufacturing - an autonomous scalable, software-defined, product-agnostic robotic factory
Comments