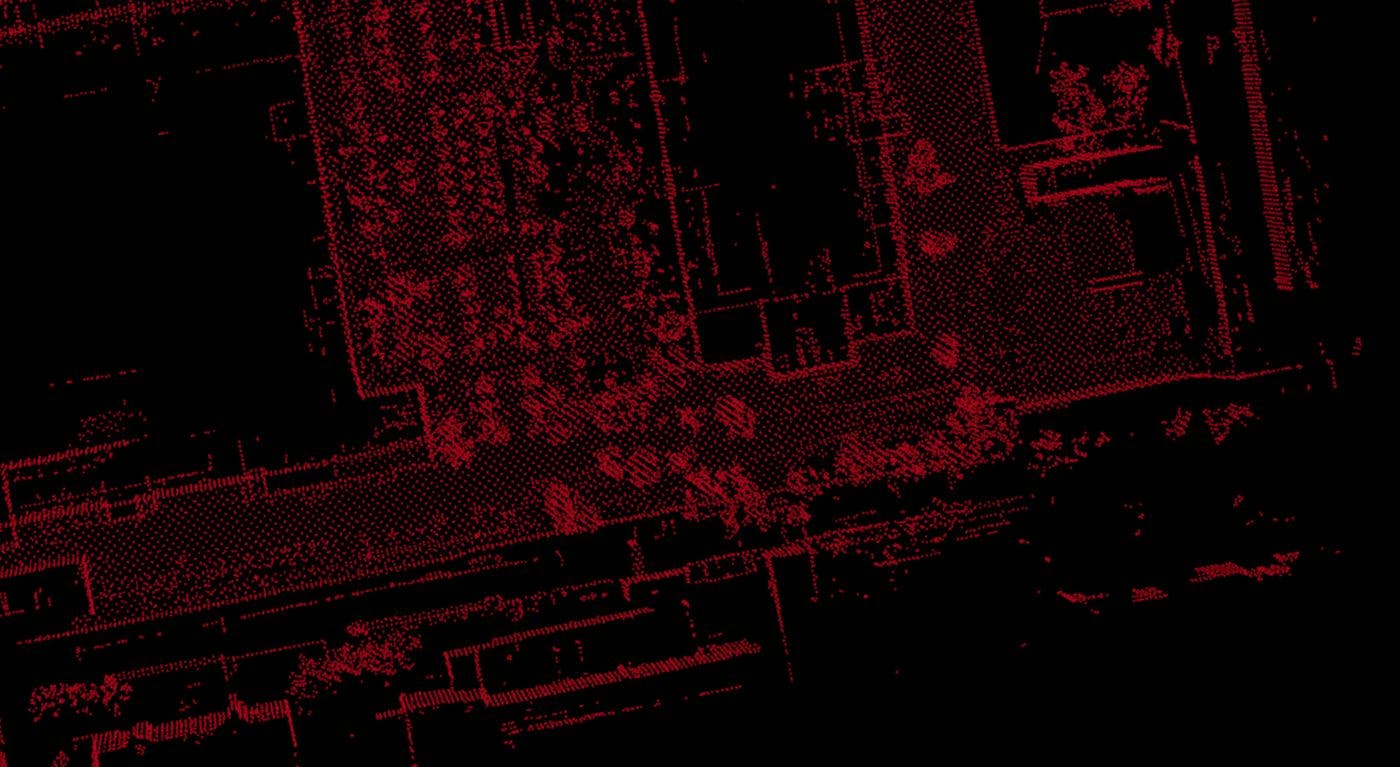
If you are lucky enough to have lidar (light detection and ranging) equipment on your mobile robot, you can use lidar data to localize the robot (define its pose) and simultaneously map the environment around it. In short, you can perform simultaneous localization and mapping (SLAM). To build a map, you need to join up all the lidar scans of the surroundings, making sure that: The map is globally precise; it has minimal deviations from an orthophoto of the same area. 2. The map is locally precise, i.e. objects in the map can be seen in detail. 3. Localization works (a robot can move from Point A to Point B using the map and lidar localization). At , a company providing cargo transportation services in supervised areas, I build maps for highly autonomous vehicles (AVs). In order to solve real-life AV tasks, I sometimes need to use modified or custom-built tools and perform operations that are not always needed in other robotics projects. To make this post useful for a wider audience of robotics enthusiasts, I’ll give you a universal algorithm for building a lidar map using free and publicly available ROS tools, so you can follow along and apply it in any project. Evocargo In this post, I will: specify which data I use to build a map; briefly outline the two main approaches to data fusion; explain graph optimization; show simple and universal steps of building a lidar map; show how open-source tools – and – can help. hdl_graph_slam interactive_slam Data used to build a lidar map First, to build a lidar map, I obviously need . Lidar scans are point clouds that show as many objects around a robot or vehicle as possible. The better the visibility and variety of the landscape, the more unique objects are seen in a cloud, so algorithms can match scans more precisely and I get better localization results. lidar scans For example, if I scan the route of an autonomous vehicle across a desert, there is not much in the scene to catch the eye, and lidar localization won’t work well. Or if lidar covers only two meters ahead and two meters to the sides, it probably won’t capture enough unique objects to match the scans precisely. Secondly, to join the lidar scans accurately, I need the location and pose of each scan. So, I also use: Odometry from lidars or wheels I prefer odometry calculated by wheel encoders over lidar odometry because errors in wheel odometry are easier to correct. Moreover, lidar odometry depends too much on unique objects in scans. GNSS Wheel and lidar odometry is fairly accurate for short distances, but it is prone to distortion at long distances. GNSS measurements are not that good for short distances and suffer from static errors, but they are globally accurate, so I use poses obtained from satellites to correct accumulated odometry errors. All these data are written to ROS bags together with other metadata that may also come in handy. For example, it’s useful to match scans and odometry measurements by time. Approaches to data fusion So, to build a map, I use lidar scans, wheel odometry, and GNSS. I need to merge (fuse) data from these three sources and find an optimal pose estimation. There are two popular approaches to data fusion: Filter-based. Graph-based. are incremental by nature, as they iteratively optimize the current pose of the robot based on several uncertainty distributions. The Kalman Filter and Particle Filter are the two most-used methods. Filter-based methods In this image, the pose of a robot at a certain moment is defined by the X coordinate and an uncertainty distribution. A pose estimate obtained from a satellite is defined by the Y coordinate and a distribution. I can put the two distributions together to get the optimal estimate. allow for building a graph that represents the robot’s trajectory and optimizing all of the robot’s poses using measurements from various sensors. For this, a graph is built whose nodes are the robot’s poses at different points in time and edges are relations between the poses such as odometry measurements. Graph-based methods To get the best pose estimate, the graph is optimized by minimizing inconsistencies between the robot’s actual poses and measurements. The Gauss-Newton and the Levenberg-Marquardt algorithms are often used for this, and g2o and gtsam frameworks are popular choices for graph optimization. Filter-based methods only find the optimal value for the last pose, while graph optimization allows adding more measurements and factors and updates the poses of all the graph nodes, that’s why I trust the results of graph-based methods more and prefer to use them in my work. Graph optimization To explain the following example is often used (you can see a similar case explained in the lecture by Prof. Dr. Wolfram Burgard as part of the “ “ course). A robot moves from Point Xi. According to encoders, the robot arrives at Point Xj, however, the robot is actually observed at a different point. graph optimization Graph-Based SLAM Introduction in Mobile Robotics The accumulated error in sensors’ measurements leads to a difference between the calculated pose and the observed pose. To correct this error, the least-squares method can be used which allows finding the best pose by minimizing the sum of the squared errors: This optimization task can be solved using the popular Gauss-Newton algorithm. In general, the steps would be as follows: Linearize the error function around the current approximation (for example, using Taylor expansion). Compute its derivative and set it to zero. Solve the linear system and get a new approximation. Repeat the steps until convergence. To dive deeper into the method and the calculations, I recommend you read “ ” by G. Grisetti, R. Kummerle, C. Stachniss, and W. Burgard. A Tutorial on Graph-Based SLAM Building a lidar map: step-by-step So, I have lidar scans, odometry measurements, and GNSS written to bags, and I have decided to use a graph-based method of building and optimizing the map. What are my next steps? I follow the proven framework described in the scientific article “ ”. Interactive 3D Graph SLAM for Map Correction This framework is built on top of the ROS ecosystem, and it allows me to create a map and map correction constraints and refine them in a GUI until I am satisfied with the result. The authors not only describe the given framework but also share the source code in public repositories, so every step can be performed using free open-source tools. After the map is created according to this framework, final testing is performed depending on the project and safety requirements. For example, at Evocargo, localization checks include tests in a simulated environment and on an autonomous vehicle driving around the testing ground. Next, let’s take a closer look at what the mentioned open-source tools can do. Building a map with hdl_graph_slam package builds a graph based on data in your ROS bag file. In simple terms, it does the following: hdl_graph_slam filters the point clouds from your bag (downsampling, outlayer removal, conversion from sensor frame to base link frame if needed) calculates odometry based on the current and the next point cloud using scan-matching methods, detects floor planes in filtered point clouds by applying RANSAC, builds the graph using GNSS, floor plane coefficients, and odometry as the inputs, optimizes the graph to compensate for accumulated errors of the scan matching. In my work, I have good-quality odometry from the vehicle’s wheels, so I can skip odometry calculations. And I don’t usually use floor detection, because the vehicle drives at real sites where the roads are not flat, so making the floor plane flat will only make things worse for me. That makes the logic even easier. Next, I save the produced map: to a .pcd file to view and evaluate the map’s quality in rviz. as a map dump containing a set of scans and poses so I can do more work on the map using the package. interactive_slam Refining the map with interactive_slam lets me correct mapping failures such as corrupted odometry, wrong loop detection, distorted map, etc. For this, it offers several automatic and semi-automatic functions (loop closing, pose constraint refinement, and plane-based constraints). The pose graph is optimized by the Levenberg-Marquardt optimizer in g2o, a hyper-graph optimization library, and the updated map is displayed. interactive_slam Out of all the suggested functions, I use more often, and usually it’s enough to achieve the desired quality. This function matches a scan with neighboring scans within the pre-set distance threshold. If they match, an edge is added between them. Automatic Loop Closing is described in more detail . Automatic Loop Closing here The GUI is super-intuitive. First, I open the map dump saved from . hdl_graph_slam Then I open the settings from the Graph menu, set a few parameters, and click Start. As easy as that. Automatic Loop Close Here I work with three parameters: is the minimal acceptable scan matching quality. It is defined by how many points in two scans match by neighboring points in a certain range. The more scan pairs meet the specified threshold, the more edges will be added. I set 0.400, but if too little scan matchings are found I lower my requirement down to 0.500. Fitness score thresh is the maximal distance (in meters) between the neighboring nodes. Scan matching will be performed for node pairs that are closer to each other than the specified value. I normally run several times. First, for sparse closing I set to 25.000, and then for dense closing, I lower it to 15.000 or even 10.000. Distance thresh Automatic Loop Closing Distance thresh is the minimal distance (in meters) between the neighboring nodes. For sparse closing, I set 20.000, and for dense closing, I lower it to 0.500. Accum distance thresh After running a few times with the mentioned parameter values, I get a good-quality map and I save it to a .pcd file. Automatic Loop Closing Conclusion Building a lidar map can be easy and efficient. In this article, I’ve made an overview of the that allows building a map and improving its quality using graphs. All the operations are made in open-source tools: and , so you can try things out right away. proven framework hdl_graph_slam interactive_slam To make sure my article is not too long and hard to read, I’ve outlined only the main ideas of described approaches and tools and focused on the functions that I find most useful based on my experience. If you are encouraged to dive deeper, please follow the links I’ve added throughout the article – there is so much more to learn there. I hope this was useful! Don’t hesitate to leave your comments, ask questions and share how you build lidar maps for your projects.