378 reads
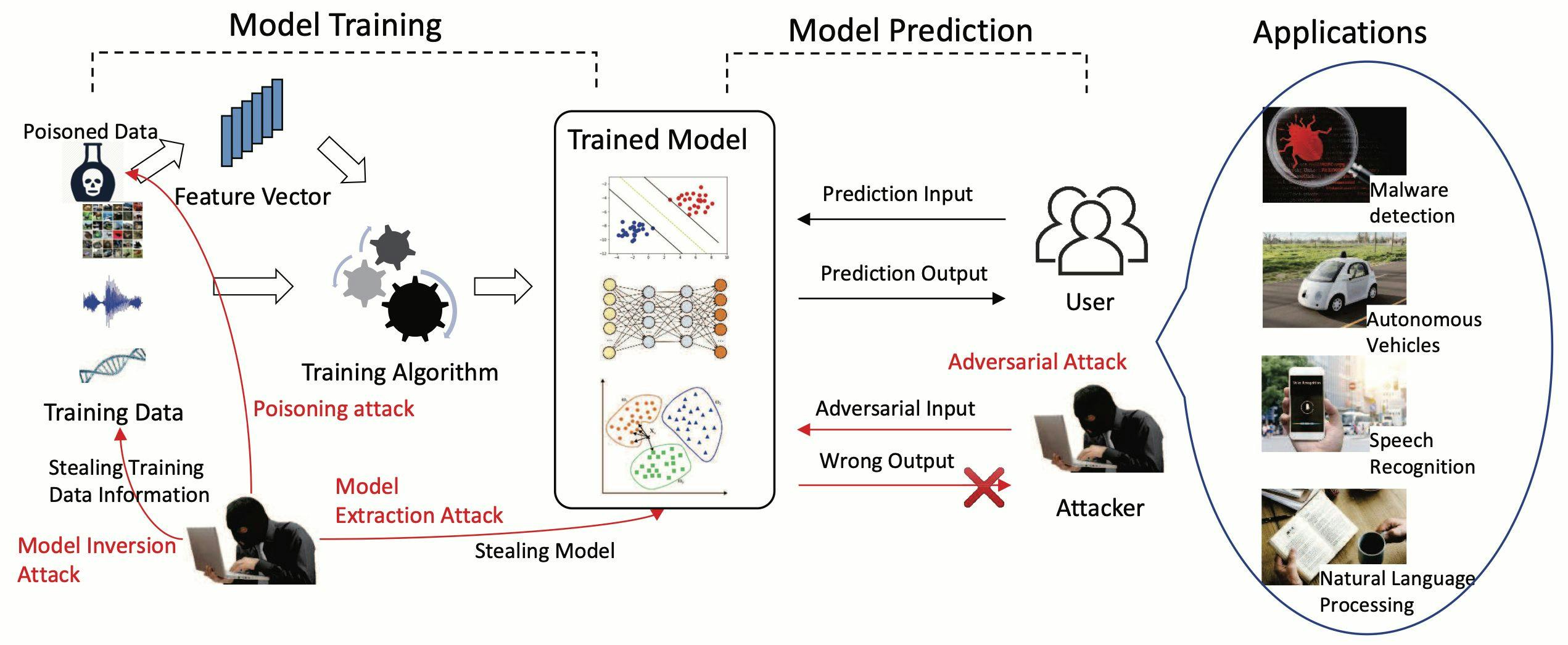
An Introduction to Adversarial Attacks and Defense Strategies
by
February 24th, 2021









About Author

Software Development Agency with a strong focus on Machine Learning and AI
Comments

Software Development Agency with a strong focus on Machine Learning and AI