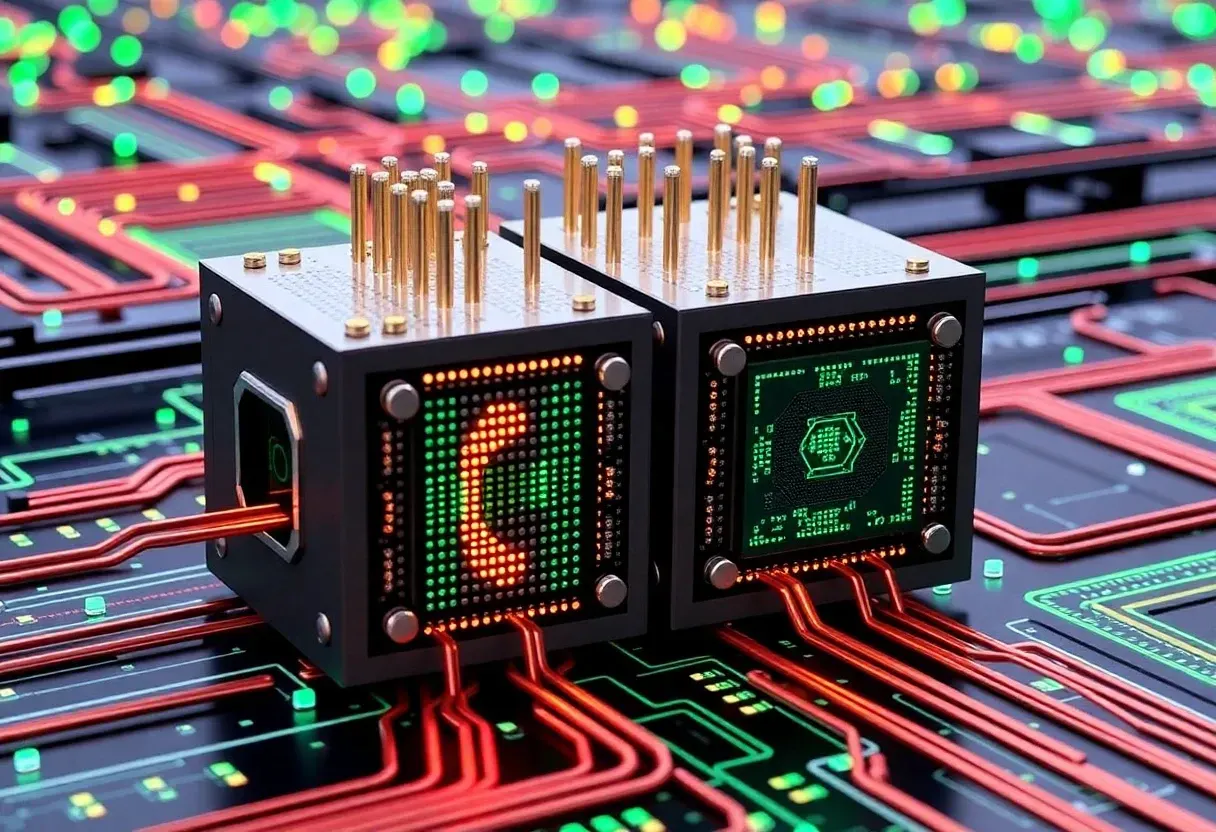
```html Autori: Almudena Carrera Vazquez Caroline Tornow Diego Ristè Stefan Woerner Maika Takita Daniel J. Egger Kopsavilkums Kvantu datori apstrādā informāciju, izmantojot kvantu mehānikas likumus. Pašreizējā kvantu aparatūra ir trokšņaina, informāciju var uzglabāt tikai īsu laiku un tā ir ierobežota ar dažiem kvantu bitiem, proti, kvibitiem, kas parasti sakārtoti plakanā savienojamībā . Tomēr daudzas kvantu skaitļošanas lietojumprogrammas prasa lielāku savienojamību nekā plakanā režģa, ko piedāvā aparatūra, ar vairāk kvibitiem, nekā ir pieejams vienā kvantu apstrādes vienībā (QPU). Kopiena cer risināt šīs problēmas, savienojot QPU, izmantojot klasisko saziņu, kas vēl nav pierādīta eksperimentāli. Šeit mēs eksperimentāli realizējam kļūdu novērstus dinamiskus ķēdes un ķēdes griešanu, lai izveidotu kvantu stāvokļus, kam nepieciešama periodiska savienojamība, izmantojot līdz pat 142 kvibitiem, kas aptver divas QPU ar 127 kvibitiem katra, savienotas reāllaikā ar klasisko saiti. Dinamiskā ķēdē kvantu vārti var tikt klasiski kontrolēti ar mērījumu rezultātiem ķēdes vidū darbības laikā, proti, dažu kvintu koherences laika daļas laikā. Mūsu reāllaika klasiskā saite ļauj mums piemērot kvantu vārtus vienai QPU, kas ir atkarīgi no mērījuma rezultāta citā QPU. Turklāt ar kļūdu novērsta vadības plūsma uzlabo kvibitu savienojamību un aparatūras instrukciju kopumu, tādējādi palielinot mūsu kvantu datoru daudzpusību. Mūsu darbs parāda, ka mēs varam izmantot vairākus kvantu procesorus kā vienu ar kļūdu novērstiem dinamiskiem ķēdes, ko nodrošina reāllaika klasiskā saite. 1 Galvenais Kvantu datori apstrādā informāciju, kas kodēta kvantu bitos ar unitāriem darbiem. Tomēr kvantu datori ir trokšņaini, un vairumā liela mēroga arhitektūru fiziskie kvibiti ir sakārtoti plakanā režģī. Tomēr pašreizējie procesori ar kļūdu novēršanu jau var simulēt aparatūrai raksturīgus Izinga modeļus ar 127 kvibitiem un izmērīt observējamās vērtības tādā mērogā, kurā klasiskajiem datoriem pieejamās pieejas sāk saskarties ar grūtībām . Kvantu datoru noderīgums ir atkarīgs no turpmākas mērogošanas un to ierobežotās kvibitu savienojamības pārvarēšanas. Modulāra pieeja ir svarīga pašreizējo trokšņaino kvantu procesoru mērogošanai un liela skaita fizisko kvibitu iegūšanai, kas nepieciešami kļūdu noturībai . Iesaistīto jonu un neitrālo atomu arhitektūras var sasniegt modularitāti, fiziski transportējot kvītus , . Tuvākajā laikā modularitāte supravadojošajos kvibitos tiek panākta, izmantojot īssavienojumus, kas savieno blakus esošās mikroshēmas , . 1 2 3 4 5 6 7 8 Vidējā termiņā varētu veikt tālu esošus vārtus, kas darbojas mikroviļņu režīmā, pa garām standarta kabeļiem , , . Tas ļautu veikt neplānainu kvibitu savienojamību, kas piemērota efektīvai kļūdu korekcijai . Tālāka alternatīva ir attālu QPU savienošana ar optisko saiti, izmantojot mikroviļņu-optisko pārveidošanu , kas, mūsuprāt, vēl nav demonstrēta. Turklāt dinamiskās ķēdes paplašina kvantu datora operāciju kopumu, veicot mērījumus ķēdes vidū (MCM) un klasiski kontrolējot vārtus kvibitu koherences laika laikā. Tās uzlabo algoritmisko kvalitāti un kvibitu savienojamību . Kā mēs parādīsim, dinamiskās ķēdes arī nodrošina modularitāti, savienojot QPU reāllaikā, izmantojot klasisko saiti. 9 10 11 3 12 13 14 Mēs izmantojam papildu pieeju, kas balstīta uz virtuāliem vārtiem, lai realizētu tālu esošas mijiedarbības modulārā arhitektūrā. Mēs savienojam kvītus jebkurās vietās un izveidojam sapīšanās statistiku, izmantojot kvazi-varbūtību sadalījumu (QPD) , , . Mēs salīdzinām tikai vietējo operāciju (LO) shēmu ar vienu, ko papildina klasiskā saziņa (LOCC) . LO shēma, kas demonstrēta divu kvibitu iestatījumā , prasa izpildīt vairākas kvantu ķēdes tikai ar vietējām operācijām. Turpretim, lai realizētu LOCC, mēs izmantojam virtuālos Bella pārus teleportācijas ķēdē, lai izveidotu divu kvibitu vārtus , . Kvantu aparatūrā ar retu un plānainu savienojamību, lai izveidotu Bell pāri starp jebkuriem kvibitiem, ir nepieciešami tāli esoši CNOT vārti. Lai izvairītos no šiem vārtiem, mēs izmantojam QPD, kas balstīts uz vietējām operācijām, kā rezultātā tiek izveidoti nogriezti Bell pāri, kurus izmanto teleportācija. LO neprasa klasisko saiti, un tādējādi ir vienkāršāk ieviest nekā LOCC. Tomēr, tā kā LOCC prasa tikai vienu parametrizētu veidnes ķēdi, to ir efektīvāk kompilēt nekā LO, un tās QPD izmaksas ir zemākas nekā LO shēmas izmaksas. 15 16 17 16 17 18 19 20 Mūsu darbs sniedz četrus galvenos ieguldījumus. Pirmkārt, mēs iepazīstinām ar kvantu ķēdēm un QPD, lai izveidotu vairākus nogrieztus Bell pārus, lai realizētu virtuālos vārtus ref. . Otrkārt, mēs apslāpējam un novēršam kļūdas, kas rodas no klasiskās vadības aparatūras aiztures dinamiskajās ķēdēs , izmantojot dinamiskās atslābšanas un nulles kļūdu ekstrapolācijas kombināciju . Treškārt, mēs izmantojam šīs metodes, lai izveidotu periodiskus robežas nosacījumus uz 103 mezglu grafika stāvokli. Ceturtkārt, mēs demonstrējam reāllaika klasisko savienojumu starp divām atsevišķām QPU, tādējādi parādot, ka izplatītu QPU sistēmu var darbināt kā vienu, izmantojot klasisko saiti . Kopā ar dinamiskajām ķēdēm tas ļauj mums darbināt abas mikroshēmas kā vienu kvantu datoru, ko mēs ilustrējam, izveidojot periodisku grafika stāvokli, kas aptver abas ierīces uz 142 kvibitiem. Mēs apspriežam tālāko ceļu, lai izveidotu tālu esošus vārtus, un sniedzam savus secinājumus. 17 21 22 23 Ķēdes griešana Mēs izpildām lielas kvantu ķēdes, kuras var nebūt tieši izpildāmas mūsu aparatūrā kvibitu skaita vai savienojamības ierobežojumu dēļ, griežot vārtus. Ķēdes griešana sadala sarežģītu ķēdi apakšķēdēs, kuras var izpildīt atsevišķi , , , , , . Tomēr mums ir jāizpilda lielāks ķēžu skaits, ko mēs saucam par paraugu ņemšanas pārslodzi. Rezultāti no šīm apakšķēdēm pēc tam tiek klasiski apvienoti, lai iegūtu sākotnējās ķēdes rezultātu ( ). 15 16 17 24 25 26 Metodes Tā kā viens no mūsu darba galvenajiem ieguldījumiem ir virtuālo vārtu realizācija ar LOCC, mēs parādām, kā izveidot nepieciešamos nogrieztos Bell pārus, izmantojot vietējas operācijas. Šeit vairāki nogriezti Bell pāri tiek izveidoti, izmantojot parametrizētas kvantu ķēdes, ko mēs saucam par nogriezto Bell pāru rūpnīcu (1. att. ). Vairāku pāru vienlaicīga nogriešana prasa mazāku paraugu ņemšanas pārslodzi . Tā kā nogriezto Bell pāru rūpnīca veido divas atsevišķas kvantu ķēdes, mēs novietojam katru apakšķēdi tuvu kvibitiem, kuriem ir tālu esoši vārti. Iegūtais resurss pēc tam tiek izmantots teleportācijas ķēdē. Piemēram, 1. att. , nogrieztie Bell pāri tiek izmantoti, lai izveidotu CNOT vārtus uz kvibitu pāriem (0, 1) un (2, 3) (skatiet sadaļu "Nogriezto Bell pāru rūpnīcas" b,c 17 b )). , IBM Quantum System Two arhitektūras attēlojums. Šeit divas 127 kvibitu Eagle QPU ir savienotas ar reāllaika klasisko saiti. Katru QPU kontrolē tās elektronika savā statīvā. Mēs cieši sinhronizējam abus statīvus, lai darbinātu abas QPU kā vienu. , Kvantu ķēdes veidne virtuālu CNOT vārtu realizēšanai uz kvibitu pāriem ( 0, 1) un ( 2, 3) ar LOCC, izmantojot nogrieztus Bell pārus teleportācijas ķēdē. Purpursarkanās dubultās līnijas atbilst reāllaika klasiskajai saitei. , Nogriezto Bell pāru rūpnīcas 2( ) diviem vienlaicīgi nogrieztiem Bell pāriem. QPD ir 27 dažādu parametru kopumi . Šeit, . a b q q q q c C θ i θ i Periodiskās robežas nosacījumi Mēs konstruējam grafika stāvokli | ⟩ ar periodiskiem robežas nosacījumiem uz ibm_kyiv, Eagle procesora , pārsniedzot tā fiziskās savienojamības ierobežojumus (skatiet sadaļu "Grafika stāvokļi" ). Mēs izmērām mezglu stabilizatorus katrā mezglā ∈ un malu stabilizatorus, kas veidoti no produkta katrā malā ( , ) ∈ . No šiem stabilizatoriem mēs veidojam sapīšanās liecinieku , kas ir negatīvs, ja ir divpusēja sapīšanās pāri malai ( , ) ∈ (atsauce ) (skatiet sadaļu "Sapīšanās liecinieks" G 1 )). Šeit ir ∣ ∣ = 103 mezgli un prasa četrus tālu esošus malu lr = {(1, 95), (2, 98), (6, 102), (7, 97)} starp augšējo un apakšējo Eagle procesora kvibitu (2. att. G V E a Si i V SiSj i j E i j E 27 )). Mēs koncentrējamies uz divpusēju sapīšanos, jo tas ir resurss, ko mēs vēlamies atjaunot ar virtuāliem vārtiem. Liecinieku mērīšana starp vairāk nekā divām pusēm mēra tikai virtuālo vārtu un mērījumu kvalitāti, padarot virtuālo vārtu ietekmi mazāk skaidru. , Smagais sešstūrainais grafiks tiek salocīts pats sev caurules formā ar malām (1, 95), (2, 98), (6, 102) un (7, 97), kas izceltas zilā krāsā. Mēs nogriežam šīs malas. , Mezglu stabilizatori (augšā) un liecinieki , (apakšā), ar 1 standarta novirzi mezgliem un malām, kas atrodas tuvu tālu esošām malām. Vertikālās punktētās līnijas grupē stabilizatorus un lieciniekus pēc to attāluma līdz nogrieztām malām. , Stabilizatora kļūdu kumulatīvā sadalījuma funkcija. Zvaigznes norāda mezglu stabilizatorus , kuriem ir mala, kas implementēta ar tālu esošiem vārtiem. Nogrieztās malas etalonā (svītrainā sarkanā līnija) tālu esošie vārti netiek realizēti, un zvaigznīšu norādītie stabilizatori tādējādi ir ar vienības kļūdu. Pelēkā zona ir varbūtības masa, kas atbilst mezglu stabilizatoriem, kuriem ietekmē nogriešana. – , Divdimensiju izkārtojumos zaļie mezgli dublē mezglus 95, 98, 102 un 97, lai parādītu nogrieztās malas. Zilie mezgli ir kvibitu resursi, lai izveidotu nogrieztus Bell pārus. Mezglu krāsa ir absolūtā kļūda ∣ − 1∣ izmērītajam stabilizatoram, kā norādīts krāsu joslā. Mala ir melna, ja sapīšanās statistika tiek konstatēta ar 99% ticamības līmeni, un violeta, ja nē. Sarakstā , tālu esošie vārti ir realizēti ar SWAP vārtiem. Sarakstā , tie paši vārti ir realizēti ar LOCC. Sarakstā , tie netiek realizēti. a b Sj c Sj d f e i Si d e f Mēs sagatavojam | ⟩ ar trim dažādām metodēm. Aparatūrai raksturīgās malas vienmēr tiek realizētas ar CNOT vārtiem, bet periodiskās robežas nosacījumi tiek realizēti ar (1) SWAP vārtiem, (2) LOCC un (3) LO, lai savienotu kvītus visā režģī. Galvenā atšķirība starp LOCC un LO ir barošanas operācija, kas sastāv no viena kvibita vārtiem, kas ir atkarīgi no 2 mērījumu rezultātiem, kur ir nogriešanas skaits. Katrs no 22 gadījumiem izraisa unikālu un/vai vārtu kombināciju attiecīgajos kvibitos. Mērījumu rezultātu iegūšana, attiecīgā gadījuma noteikšana un darbība, pamatojoties uz to, tiek veikta reāllaikā ar vadības aparatūru, ar fiksētu pievienoto aiztures izmaksu. Mēs novēršam un apslāpējam kļūdas, kas rodas no šīs aiztures, izmantojot nulles kļūdu ekstrapolāciju un pakāpenisku dinamisko atslābināšanu , (skatiet sadaļu "Kļūdu novērsti kvantu ķēdes pārslēgšanas instrukcijas" G n n n X Z 22 21 28 )). ). Turpretim LOCC un LO malu realizācija lr neprasa SWAP vārtus. To mezglu un malu stabilizatoru kļūdas mezgliem, kas nav iesaistīti nogriešanā, cieši seko nogrieztās malas etalonam (2. att. ). Gluži pretēji, stabilizatori, kas ietver virtuālu vārtu, ir mazāka kļūda nekā nogrieztās malas etalons un swap implementācija (2. att. , zvaigznīšu marķieri). Kā kopēju kvalitātes rādītāju mēs vispirms ziņojam par mezglu stabilizatoru absolūto kļūdu summu, proti, ∑ ∈ ∣ − 1∣ (Papildu datu tabula ). Lielā SWAP pārslodze ir atbildīga par 44.3 absolūto kļūdu summu. 13.1 kļūda nogrieztās malas etalonā ir dominēta ar astoņiem mezgliem uz četrām nogriešanām (2. att. , zvaigznīšu marķieri). Turpretim LO un LOCC kļūdas ietekmē MCM. Mēs attiecinām 1.9 papildu kļūdu LOCC pār LO uz aiztures un CNOT vārtiem teleportācijas ķēdē un nogrieztajiem Bell pāriem. Swap balstītajos rezultātos nekonstatē sapīšanos vairāk nekā 35 no 116 malām ar 99% ticamības līmeni (2. att. ). LO un LOCC implementācijai liecinieks konstatē divpusējas sapīšanās statistiku visās malās ar 99% ticamības līmeni (2. att. ). Šie rādītāji parāda, ka virtuālie tālu esošie vārti rada stabilizatorus ar mazākām kļūdām nekā to sadalījums SWAPos. Turklāt tie uztur dispersiju pietiekami zemu, lai pārbaudītu sapīšanās statistiku. Mēs salīdzinām | ⟩ SWAP, LOCC un LO implementācijas ar aparatūrai raksturīgu grafika stāvokli uz ′ = ( , ′), kas iegūts, noņemot tālu esošos vārtus, proti, ′ = lr. Ķēde, kas sagatavo | ′⟩, tādējādi prasa tikai 112 CNOT vārtus, kas sakārtoti trijos slāņos, sekojot Eagle procesora smagajam sešstūrainajam topoloģijai. Šī ķēde ziņos par lielām kļūdām, mērot | ⟩ mezglu un malu stabilizatorus mezgliem, kas atrodas nogrieztā vārtā, jo tā ir izstrādāta, lai realizētu | ′⟩. Mēs saucam šo aparatūrai raksturīgo etalonu par nogrieztās malas etalonu. Swap balstītā ķēde prasa papildu 262 CNOT vārtus, lai izveidotu tālu esošās malas lr, kas krasi samazina izmērīto stabilizatoru vērtību (2. att. G G V E E EE G G G E b–d E b,c c i V Si 1 c b,d G e Divu QPU darbināšana kā viena Tagad mēs apvienojam divas Eagle QPU ar 127 kvibitiem katra vienā QPU, izmantojot reāllaika klasisko savienojumu. Ierīču darbināšana kā viens, lielāks procesors ietver kvantu ķēžu izpildi, kas aptver lielāku kvibitu reģistru. Papildus unitārajiem vārtiem un mērījumiem, kas darbojas vienlaicīgi uz apvienotās QPU, mēs izmantojam dinamiskās ķēdes, lai veiktu vārtus, kas iedarbojas uz abām ierīcēm esošajiem kvibitiem. Tas ir iespējams, pateicoties ciešai sinhronizācijai un ātrai klasiskai saziņai starp fiziski atdalītiem instrumentiem, kas nepieciešami, lai savāktu mērījumu rezultātus un noteiktu vadības plūsmu visā sistēmā . 29 Mēs testējam šo reāllaika klasisko savienojumu, izveidojot grafika stāvokli uz 134 kvibitiem, kas veidots no smagiem sešstūrainiem gredzeniem, kas vijas cauri abām QPU (3. att. . Šie gredzeni tika izvēlēti, izslēdzot kvītus, kas tika ))