
9,431 रीडिंग
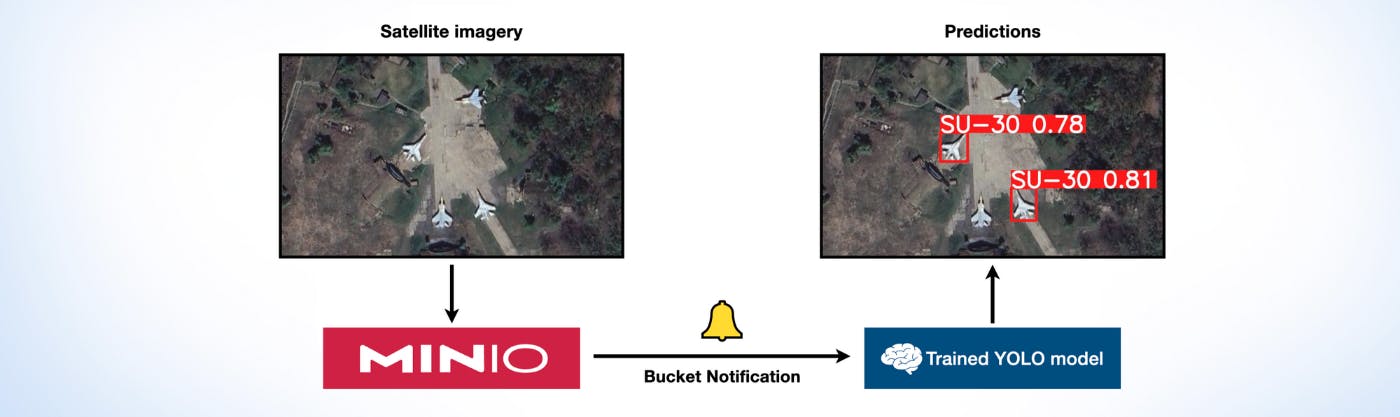
मिनिओ और योलो के साथ कस्टम डेटासेट का उपयोग करके ऑब्जेक्ट डिटेक्शन मॉडल को कैसे प्रशिक्षित करें
by byMinIO@minio
byMinIO@minio
MinIO is a high-performance, cloud-native object store that runs anywhere (public cloud, private cloud, colo, onprem).
2023/11/22


















MinIO is a high-performance, cloud-native object store that runs anywhere (public cloud, private cloud, colo, onprem).
Story's Credibility



MinIO is a high-performance, cloud-native object store that runs anywhere (public cloud, private cloud, colo, onprem).
Story's Credibility
About Author

MinIO is a high-performance, cloud-native object store that runs anywhere (public cloud, private cloud, colo, onprem).
टिप्पणियाँ












