
9,431 lectures
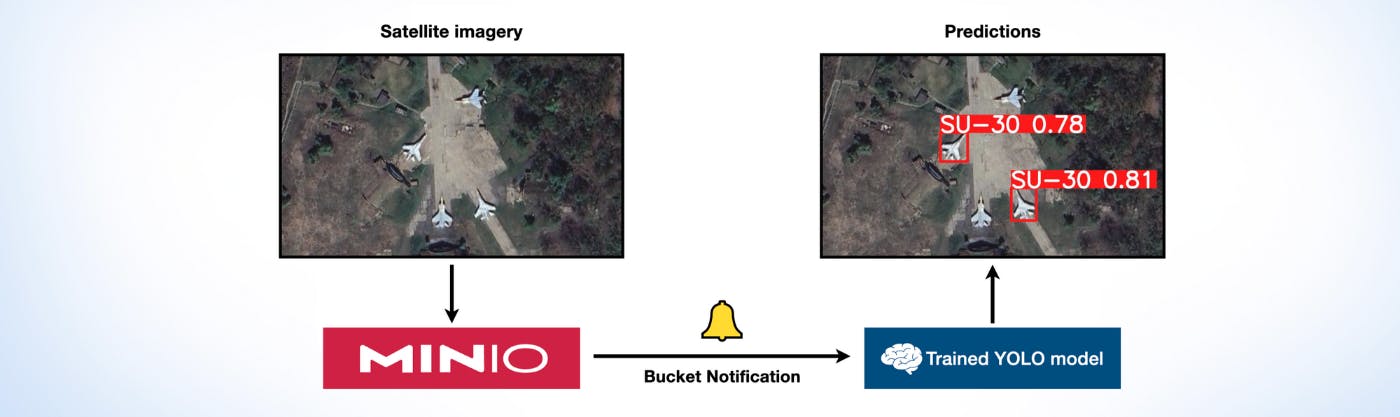
Comment former un modèle de détection d'objets à l'aide d'un ensemble de données personnalisé avec MinIO et YOLO
by byMinIO@minio
byMinIO@minio
MinIO is a high-performance, cloud-native object store that runs anywhere (public cloud, private cloud, colo, onprem).
2023/11/22


















MinIO is a high-performance, cloud-native object store that runs anywhere (public cloud, private cloud, colo, onprem).
Story's Credibility



MinIO is a high-performance, cloud-native object store that runs anywhere (public cloud, private cloud, colo, onprem).
Story's Credibility
About Author

MinIO is a high-performance, cloud-native object store that runs anywhere (public cloud, private cloud, colo, onprem).
COMMENTAIRES











