2,991 reads
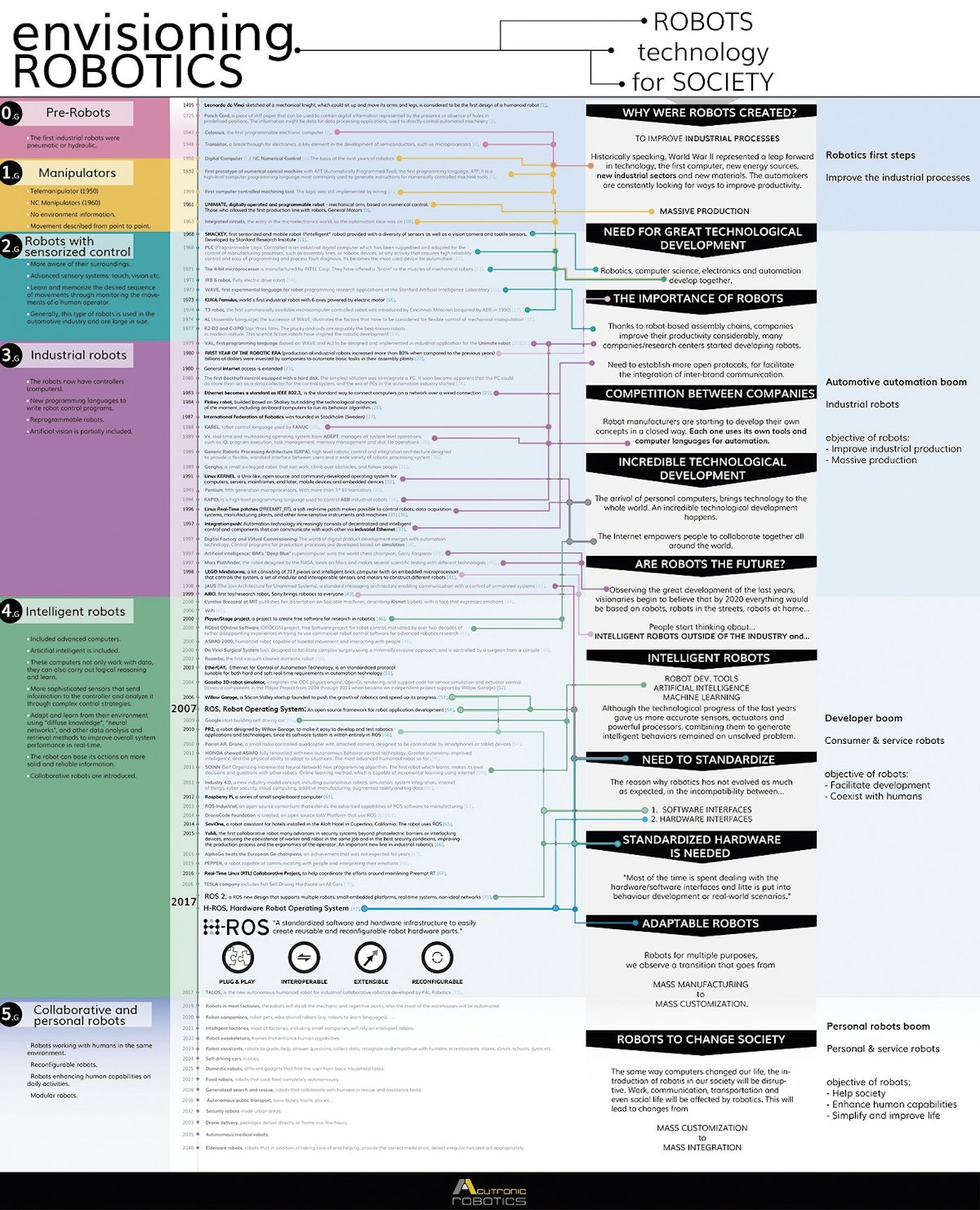
Envisioning the future of robotics





Too Long; Didn't Read
<em>Peer written with </em><a href="https://medium.com/@irati" data-anchor-type="2" data-user-id="e9b73593e3f" data-action-value="e9b73593e3f" data-action="show-user-card" data-action-type="hover" target="_blank"><em>Irati Zamalloa Ugarte</em></a><em>.</em>People Mentioned

Companies Mentioned




Víctor Mayoral Vilches
@vmayoral
L O A D I N G
. . . comments & more!
. . . comments & more!