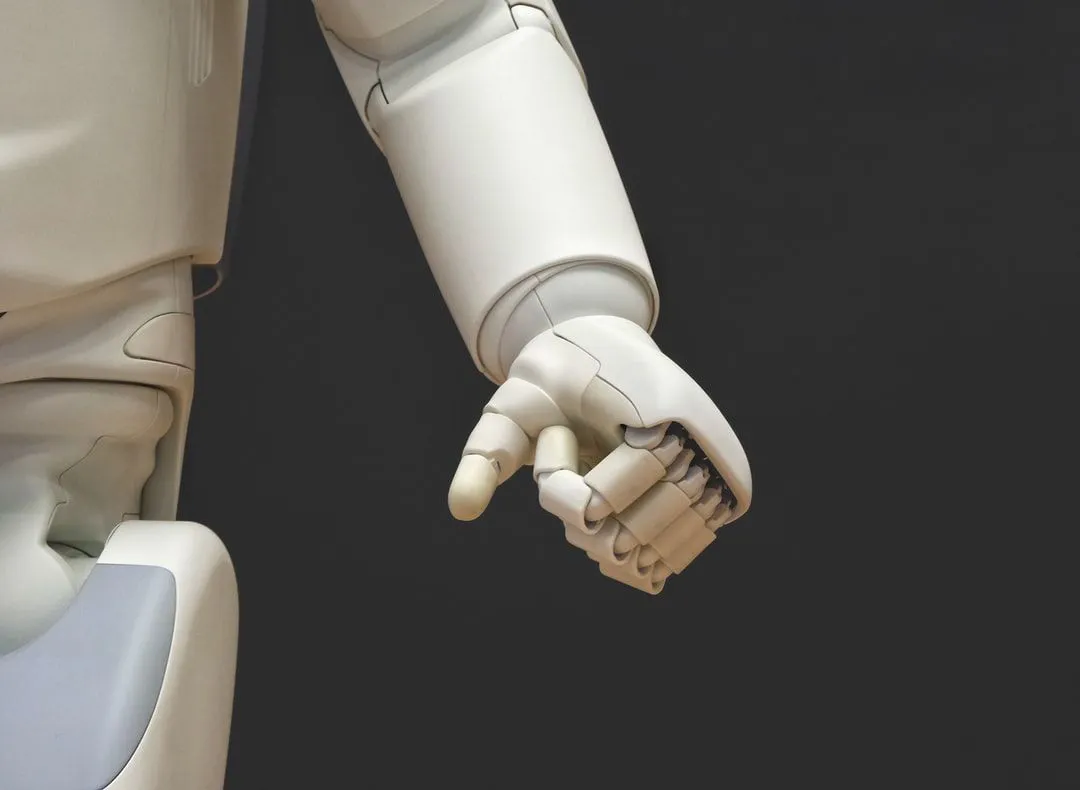
Scene: The Terminator removes the skin from its hand showing a metallic skeleton. Shivers. The above visual from the popular film shocks even those who have never watched it. But let's have a look behind the curtain. Turns out, , that mechanical hand does not have a long life. in the real world In 2019, Promobot presented its first robot assistant, Alex, on the Robot Forum. The new robotic system Robo-C had a humanoid appearance. The trending technology on the platform that year were robotic arms. What is Robo-C all About? Robo-C is an anthropomorphic robot built to interact with humans. Its verbal interaction functions are as follows: The robot asks and answers questions asked by people. However, real communication includes non-verbal elements as well, e.g., gestures, reactions etc. To improve the anthropomorphic look of the robot -- which should appeal to humans-- we built the project with functional manipulators. Thus, we made a robot with human-like hands. The Promobot team formulated a list of functions, parameters, and restrictions for the manipulators. The robot arm was made as a self-supporting active skeleton of aluminum, polymeric materials, ABS and ABS-like plastics, silicone, and polyurethane. The prototype had 5 functional blocks: shoulder, forearm, elbow, wrist, and hand. Each part had to meet its own kinematic requirements, e.g. the shoulder should rotate up to 90 degrees with respect to the median. At this stage, we didn’t focus on perfecting the fine motor movements, i.e., only a thumb moved independently, other fingers were co-dependent. The technical restrictions caused a list of particular requirements. Marketers, psychologists, and designers were included in the process of development. They wanted the robot to be a lot less noisy. Also, they asked to decrease the backlashes in the joints to avoid the tremor effect. Indeed, a shaky robot would not be easy to watch. A Fist for a Hand According to the plan, we built a manipulator prototype with two parts, i.e., a differential as the driving element of the shoulder and elbow, and the direct rope transmissions as the driving elements of the wrist and hand. It was an awesome and very complex solution with a large number of non-standard parts. However, the main problem of such an approach was the impossible nature of disassembling the individual mechanical parts. It made the entire compilation unserviceable. In order to replace one part, the entire manipulator would have to be disassembled. In the future, when robots will repair robots, this problem will disappear. But nowadays humans adjust robots and the problems associated with custom repair services should be strategically limited. Another issue with the initial prototype was that the prototype skeleton parts were too fragile. The nodes in the drawings, plans, and diagrams which seemed reliable in the drawings, were in practice a matter of increased risks and stress. The steel rope and roller system were under increased stress despite the calculations being encouraging. When the cables tore, the drive elements made uncontrollable movements. These movements caused the bevel gears to wear out, and the backlash formed in the prototype. Furthermore, we encountered many challenges with the manipulator`s control. When we moved the arm in 3 axes, a dozen of unexected defects could be detected. It should be controlled by a set of sensors and analyzers for automatization of the manipulation. The prototype was a rough draft with work without any failures for 8 hours, however the specification required about 3000 hours without failure. A crash-test of a new arm allowed the team to detect all errors to be corrected at the next iteration. Nice to Meet you, Droid! In the summer of 2021, engineers presented the next version of the manipulators for android. This helped us fix the robot hands and design the additional requirements for the project such as elements needed for driving, servo drives, and sets of standard and non-standard nodes. If we compare the first prototype with actual Alex’s manipulators it will look like the human claw from Lego against Terminator’s hand. We modified motors, gear-motors, servo drives. On a hardware level: We performed a variety of dimensions and movements. We also rewrote the software and the control models. We developed all we mentioned in the specification. What was the key to success? It was teamwork. With the feedback of engineers from different departments, we got an opportunity to look at our robot from different perspectives, to appreciate the user experience, and to make test trail of the robot’s performance before release. Being an engineer I appreciated the iterative approach which became a factor for success. We did not live only by the calculations and theories written on paper. Again and again, we were developing a new product and improving its characteristics. We survived the endless iterations that is a major criterion that distinguishes the success of our team. Is this the end? It is not! We will continue to improve hands, face, skin, and eyes movements – everything that can be improved -- because this is the right process in the engineering realm. I argue that iterations themselves are not continuous. While developing the manipulator, we gained valuable experience which gave us insight for how to create future iterations much faster. Instead of working for 10 weeks, we can now do the same work in 4 weeks. This knowledge allowed us to employ the newly learned successful techniques for other models of our robots. The above piece was written by Andrei Vaskov -- an engineer and industrial designer at Promobot.