




642 reads
Building a Lidar Map using Graphs and Open-Source Tools
by Anatoly KabakovMay 11th, 2023





Too Long; Didn't Read
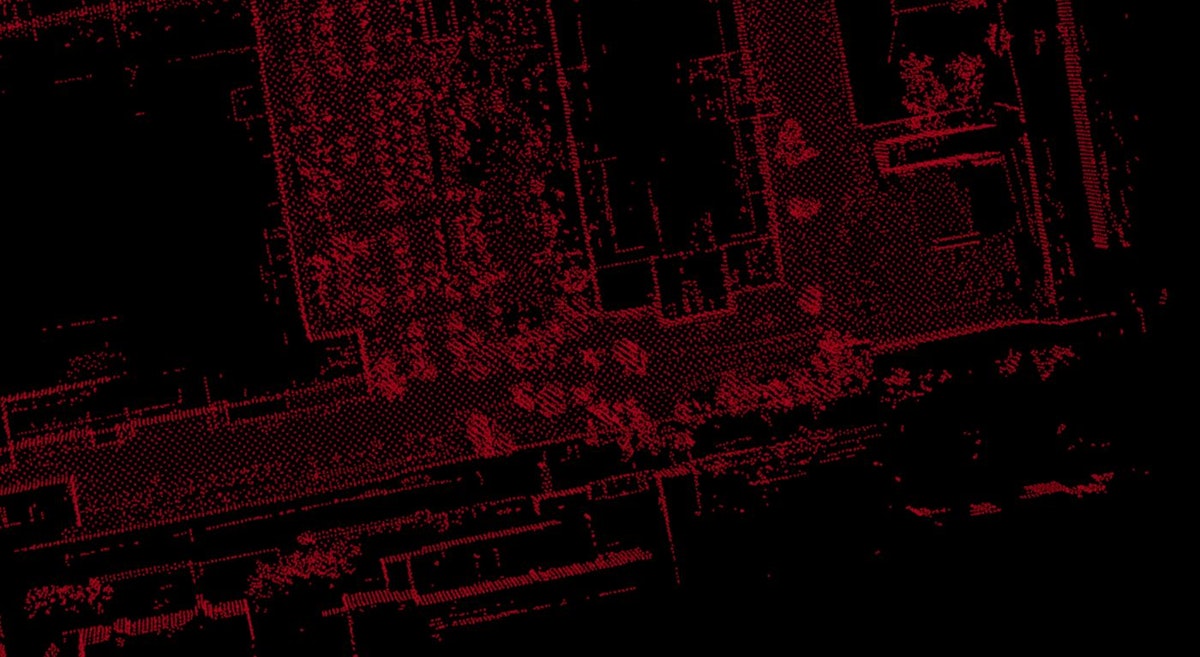
Lidar data can be used to localize the robot and simultaneously map the environment. For this, join up the lidar scans accurately so that there are no object duplications, overlaps and other artefacts. Two popular approaches to merging lidar data are: 1. filters (e.g. the Kalman Filter) that iteratively optimize the current pose of the robot based on several uncertainty distributions and 2. graph-based methods that optimize all of the robot’s poses in a graph using measurements from various sensors. For graph optimization, i.e. to correct the accumulated error in sensors’ measurements, the least-squares method can be used. To build a lidar map using graph-based method, open a ROS bag containing lidar scand, odometry and GNSS values in the hdl_graph_slam package. This tool builds the first rough version of the map with inconsistencies. Next, load this map in interactive_slam. Run the Automatic Loop Closing function several times with the sets of parameters described in the article until you are happy with the map quality. To dive deeper in graph SLAM, explore the scientific articiles and educational videos mentioned in the article.

Anatoly Kabakov
@anatoly93rus
L O A D I N G
. . . comments & more!
. . . comments & more!
About Author
TOPICS
THIS ARTICLE WAS FEATURED IN...



RELATED STORIES





11 Best Automation Testing Tools to Try in 2021 #qa
Invalid Date



